Mercury 1.0
Mercury 1.0 — это компактная отладочная плата на базе популярного микроконтроллера ESP8266 с архитектурой XTENSA LX106. Она работает на максимальной частоте 160 МГц и оснащена 4 МБ flash-памяти.



О плате Mercury 1.0
Mercury 1.0 — это компактная и эффективная отладочная плата на базе микроконтроллера ESP8266. Она идеально подходит для бюджетных IoT-проектов, обеспечивая надежное беспроводное соединение Wi-Fi. Плата разработана для простой интеграции в различные системы автоматизации и обучения робототехнике, предлагая удобный доступ к основным GPIO и специализированным портам.Технические характеристики
Полные спецификации оборудования для Mercury 1.0
Связь
Микроконтроллер
✨ Возможности и пины
Быстрая настройка
Конфигурации для быстрого старта на Mercury 1.0 — автоматически сгенерированы из спецификаций платы.
В Arduino IDE откройте Boards Manager, найдите "esp8266" от ESP8266 Community и установите пакет. Выберите Generic ESP8266 Module в меню плат.
[env:mercury1] platform = espressif8266 board = esp12e framework = arduino
; Точная конфигурация железа для Mercury 1.0 board_build.f_cpu = 160000000L board_build.flash_mode = dio
esp8266:
board: esp12e
Mercury 1.0 - 160 МГц ESP8266
Flash: 4MB</code></pre>
Вставьте в .yaml файл устройства. См. документацию ESPHome ESP8266 для полного списка опций.
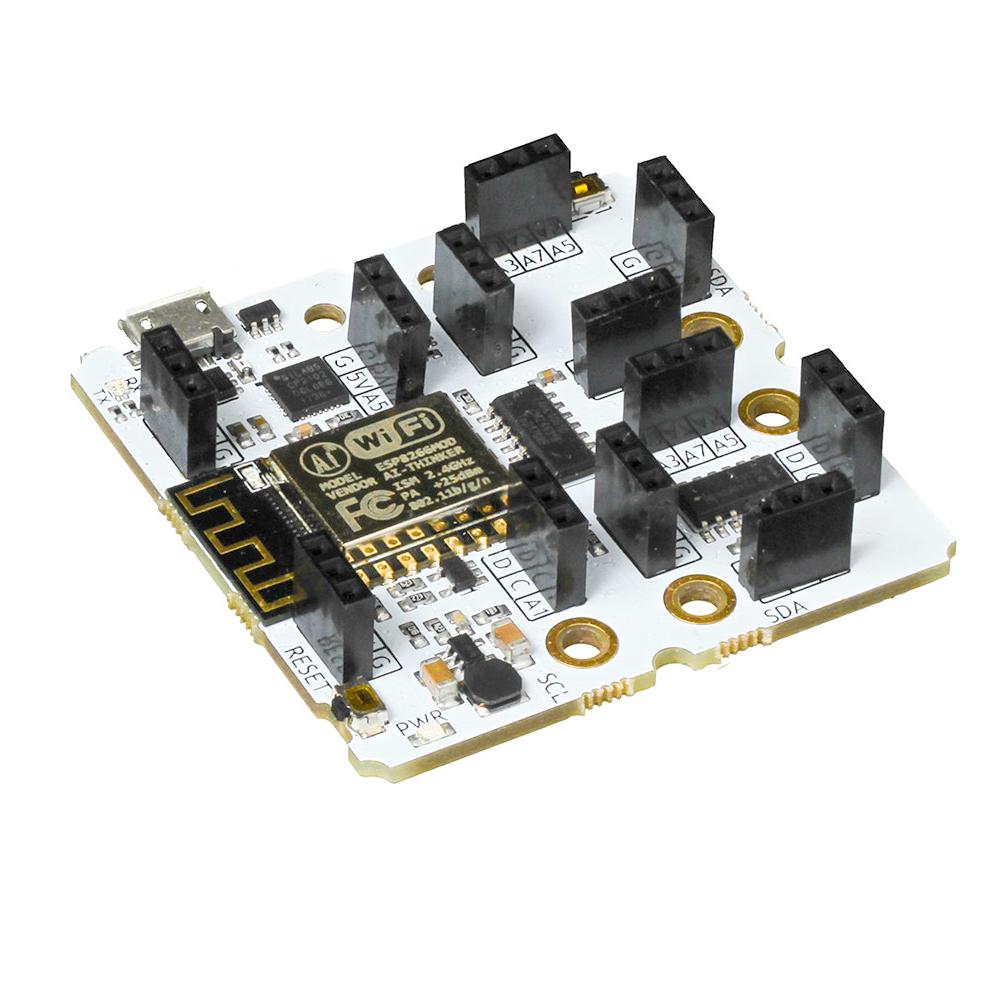
Схема распиновки Mercury 1.0
Полная справка по выводам Mercury 1.0
Распиновка Mercury 1.0 обеспечивает доступ к основным GPIO контроллера ESP8266. Плата оснащена выводами для питания, UART-интерфейсом и специализированными разъемами для подключения периферии (SERVO, IR, US). Поддержка ШИМ на некоторых выводах позволяет управлять яркостью светодиодов или скоростью двигателей.
Маппинг пинов
Полная распиновка и соответствие GPIO для Mercury 1.0
Пин
Аналог
Тач
PWM
Другое
0
LED_BUILTIN
2
4
5
9
10
12
13
14
15
16
D7
USST
D8
USSE
D4
PWM
SERVO1
D6
PWM
SERVO2
D3
PWM
SERVO3
D5
PWM
SERVO4
D9
IR1
D10
IR2
Легенда
A0
Аналоговый вход
PWM
Поддержка ШИМ
LED
Встроенный светодиод
#
Номер пина
Инструменты и конфигурация по умолчанию
Настройки сборки и загрузки для Mercury 1.0
Настройка
Значение
Инструмент загрузки
esptool
Режим Flash
dio
Макс. размер данных
80 КБ
(81920 байт)
Сводка конфигурации
Mercury 1.0 использует esptool для прошивки. Режим flash: dio. Максимальный размер данных для этого модуля составляет 80 КБ.
Похожие платы
Другие платы разработки с микроконтроллером ESP8266