Проект ученика 8 класса Карпича Дмитрия Станиславовича (ГБОУ Школа №2009) под руководством Мырадова Мырата Вепаевича.
Бикоптер — нестандартный тип дрона, в котором управление осуществляется всего двумя моторами и двумя сервоприводами. Дмитрий поставил себе задачу создать компактный, манёвренный и доступный по стоимости летательный аппарат, способный работать в условиях труднодоступной местности при поисково-спасательных операциях.

1. Цель и задачи проекта
Большинство дронов для SAR-операций (Search and Rescue) либо слишком дороги, либо слишком громоздки для переноски в рюкзаке. Бикоптер решает эту проблему: всего два ротора, минимум конструктивных элементов, небольшой вес.
Задачи проекта:
- Изучить аналоги и выбрать оптимальные технические решения
- Подобрать электронные компоненты
- Создать 3D-модель рамы
- Собрать летающий прототип
- Выбрать и настроить программное обеспечение полётного контроллера
- Провести начальную калибровку и первые полёты
- Настроить PID-коэффициенты для стабильного полёта
2. Исследование аналогов
Перед разработкой Дмитрий изучил существующие бикоптеры:
| Аналог | Особенности |
|---|---|
| Bicopter by RCExplorer | Классическая V-образная компоновка, открытая документация |
| Bicopter by YXC | Компактный, но закрытая конструкция |
| Bicopter by algerbens | Экспериментальная рама, нестандартный подход |

По итогам анализа была выбрана собственная конструкция с металлическим профилем в основании — для жёсткости и минимального веса.
3. Технические компоненты
Полётный контроллер: STM32F411CEU6 (Blackpill) — высокопроизводительный 32-битный микроконтроллер с тактовой частотой 100 МГц.
Гироскоп/акселерометр: MPU6500 — обеспечивает измерение угловых скоростей и ускорений по всем трём осям.
Бесколлекторные моторы: Axis Flying 2207.5 — мощные моторы с высоким KV-рейтингом, изначально разработанные для гоночных дронов.
Сервоприводы: EMAX ES08MAII — аналоговые сервоприводы с металлическими шестернями, обеспечивают наклон моторов для управления тягой.
Приёмник: Happymodel EP1 — компактный ELRS-приёмник с отличной дальностью связи.
Аккумулятор: Li-Po 3S/4S — лёгкий и ёмкий источник питания.
Итоговые характеристики прототипа:
- Размеры: 24 × 11 × 14 см
- Масса: 329 г
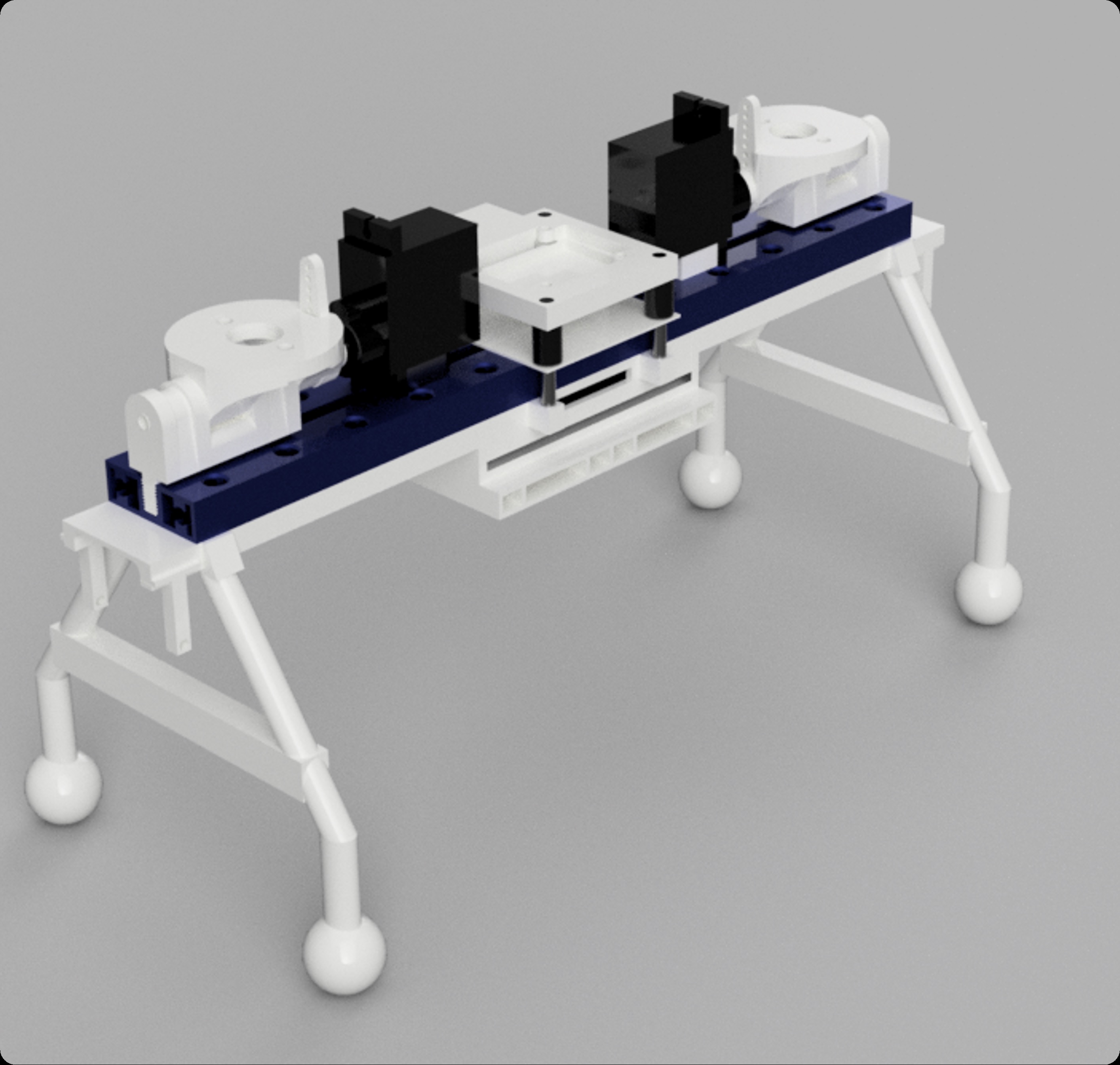
4. 3D-моделирование и итерации конструкции
Один из ключевых аспектов работы — многократная переработка конструкции. Прежде чем выйти на финальную версию, Дмитрий прошёл несколько итераций рамы, каждый раз выявляя и устраняя недостатки.
- Итерация 1: Слишком гибкая рама из PLA → вибрации передавались на полётный контроллер
- Итерация 2: Усиленная рама + изменение расположения батареи → улучшение балансировки
- Финальная версия: Металлический профиль как несущая балка + 3D-печатные крепления → жёсткость без лишнего веса
Все детали разрабатывались в САПР, затем печатались на FDM-принтере из PLA-пластика.
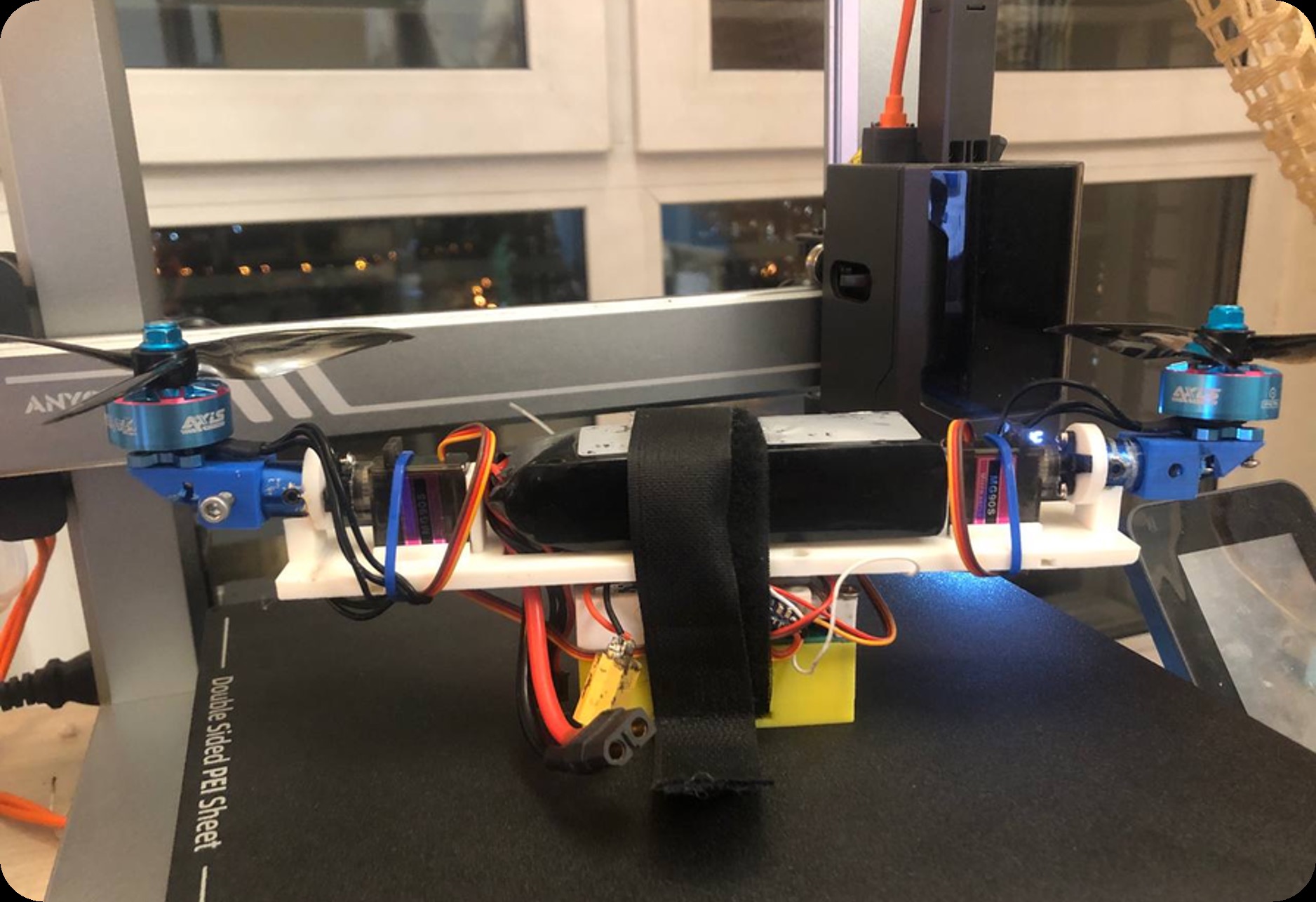
5. Сборка прототипа
После 3D-моделирования началась реальная сборка: установка электроники на раму, пайка разъёмов, прокладка проводов, балансировка центра масс.


6. Программное обеспечение — Betaflight
В качестве прошивки полётного контроллера выбран Betaflight — открытое ПО с широкими возможностями настройки.

Почему Betaflight:
- Интуитивный конфигуратор с визуализацией в реальном времени
- Поддержка нестандартных конфигураций (в т.ч. бикоптеров)
- Гибкая настройка PID-коэффициентов
- Подробная документация сообщества
PID-настройка — самый трудоёмкий этап. Дмитрий последовательно подбирал коэффициенты P (пропорциональный), I (интегральный) и D (дифференциальный) для стабилизации по крену, тангажу и рысканью.
7. Видеоматериалы
8. Перспективы развития
GPS-модуль — позволит бикоптеру удерживать позицию в воздухе и упростит поиск пострадавших: координаты будут автоматически передаваться на пульт оператора.
Собственная плата — разводка печатной платы сократит количество проводов, уменьшит массу и повысит надёжность всей электронной части.
Замена микроконтроллера — STM32F411CEU6 имеет лишь два порта UART, что ограничивает подключение дополнительных модулей. Переход на более мощный контроллер расширит функциональность.
Автор проекта

Бикоптер Карпича Дмитрия — работающий летательный прототип, созданный школьником с нуля: от 3D-моделирования и подбора компонентов до настройки PID и первых полётов. Проект доказывает, что аэрокосмические технологии доступны для изучения уже в школьном возрасте.