Проект учеников 9 класса Скибы Радомира Александровича и Барболина Тимура Александровича (ГБОУ Школа №2009) под руководством Мырадова Мырата Вепаевича.
Микро-сумо — один из самых технически насыщенных форматов соревновательной робототехники. В объёме всего 5×5×5 сантиметров и весе до 100 грамм нужно уместить двигатели, датчики, управляющую электронику и силовую систему. Радомир и Тимур разработали три поколения роботов, каждый раз применяя новые инженерные подходы — и дошли до призовых мест на всероссийских соревнованиях.
1. Что такое микро-сумо?
Микро-сумо — это формат робототехнических соревнований, в котором два автономных робота сражаются на круглой арене. Правила просты и жёстки:
Запрещено: присоски и вакуумные устройства, липкие вещества, генераторы помех, повреждение арены или соперника.
Цель: вытолкнуть робота противника за пределы круглой арены. Робот должен сам найти соперника, подъехать к нему и вытолкнуть — без какого-либо управления оператором.
2. Цель проекта
Авторы поставили перед собой задачу испытать различные инженерные подходы к конструированию микро-сумо роботов — в части расположения компонентов, выбора элементной базы и применяемых материалов — чтобы выявить оптимальное техническое решение для победы в соревнованиях.
3. Анализ аналогов
Перед разработкой были изучены роботы победителей крупных турниров:
- Победители RoboFinist 2023 — акцент на агрессивный отвал и мощную базу
- Победители RoboFinist 2024 — низкий центр тяжести, инфракрасная разведка
- Мексиканские команды — принципиально иная компоновка, упор на скорость
Каждый подход давал преимущества в определённых сценариях боя. Радомир и Тимур решили проверить несколько подходов на практике.
4. Первая версия — Сервоприводы и лазеры
Концепция: использовать сервоприводы для движения — нестандартное решение, обеспечивающее точность позиционирования.
Технические решения:
- Движение: сервоприводы (модифицированные на непрерывное вращение)
- Навигация: 3 лазерных датчика расстояния
- Колёса: диаметр 2,5 см
- Монтаж: жгуты проводов (ручной)
- Питание: не продумано заранее → проблемы с балансировкой нагрузки
Выводы: сервоприводы дают меньшую тягу по сравнению с N20-моторами той же массы. Проводной монтаж увеличивает вес и усложняет обслуживание. Система питания требует предварительного расчёта.
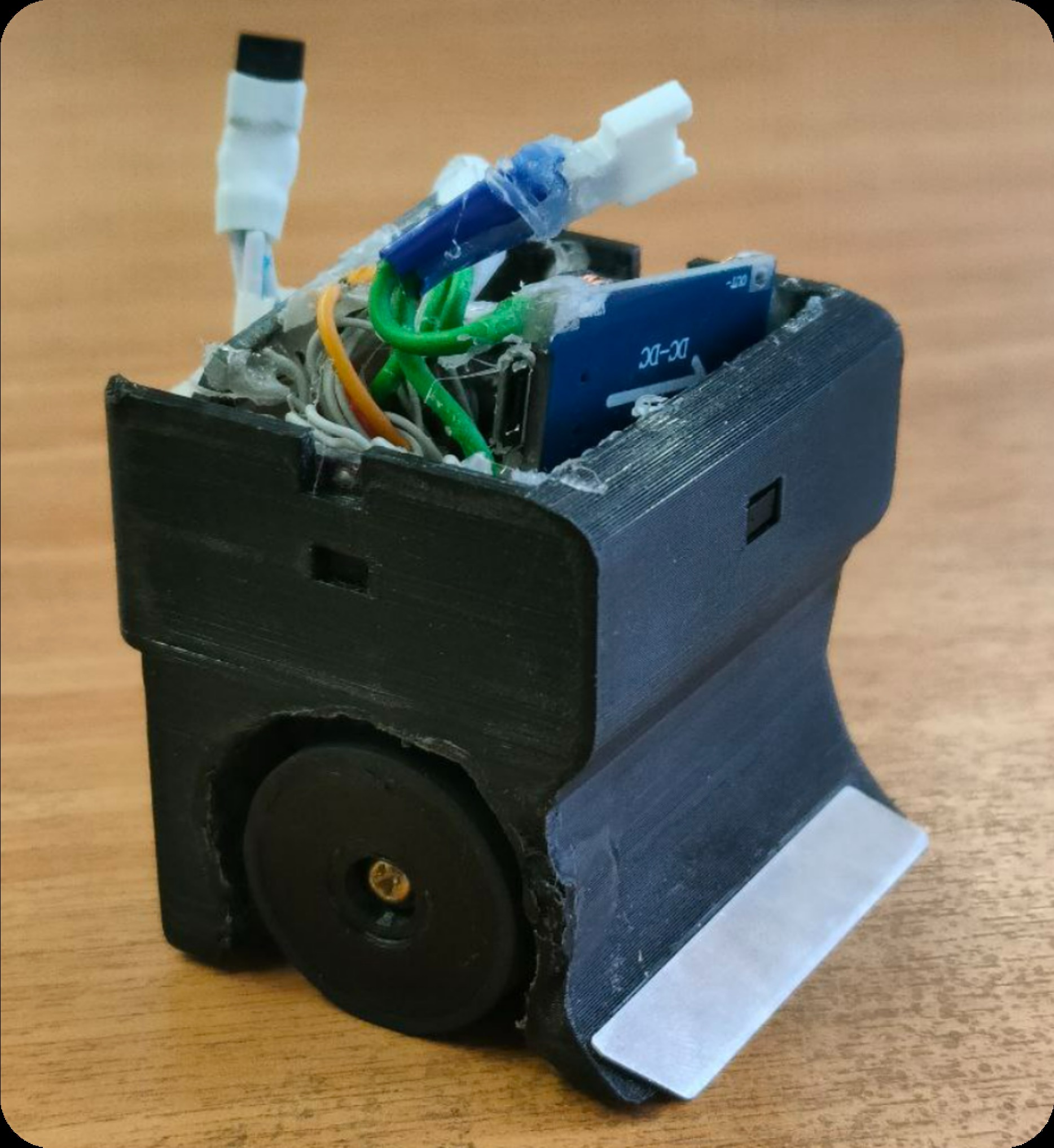
5. Вторая версия — N20 вертикально и три платы
Концепция: перейти на высокооборотные N20-моторы, улучшить систему питания, перенести монтаж на печатные платы.
Технические решения:
- Движение: моторы N20 в вертикальном расположении
- Навигация: 3 лазерных датчика
- Колёса: диаметр 1,5 см (меньше → ниже центр тяжести)
- Монтаж: 3 печатных платы
- Питание: продуманная трёхуровневая схема
Выводы: N20-моторы значительно превосходят сервоприводы по соотношению тяги к весу. Печатные платы снизили массу и повысили надёжность. Однако вертикальное расположение моторов создавало нежелательные нагрузки на вал при боковых ударах.
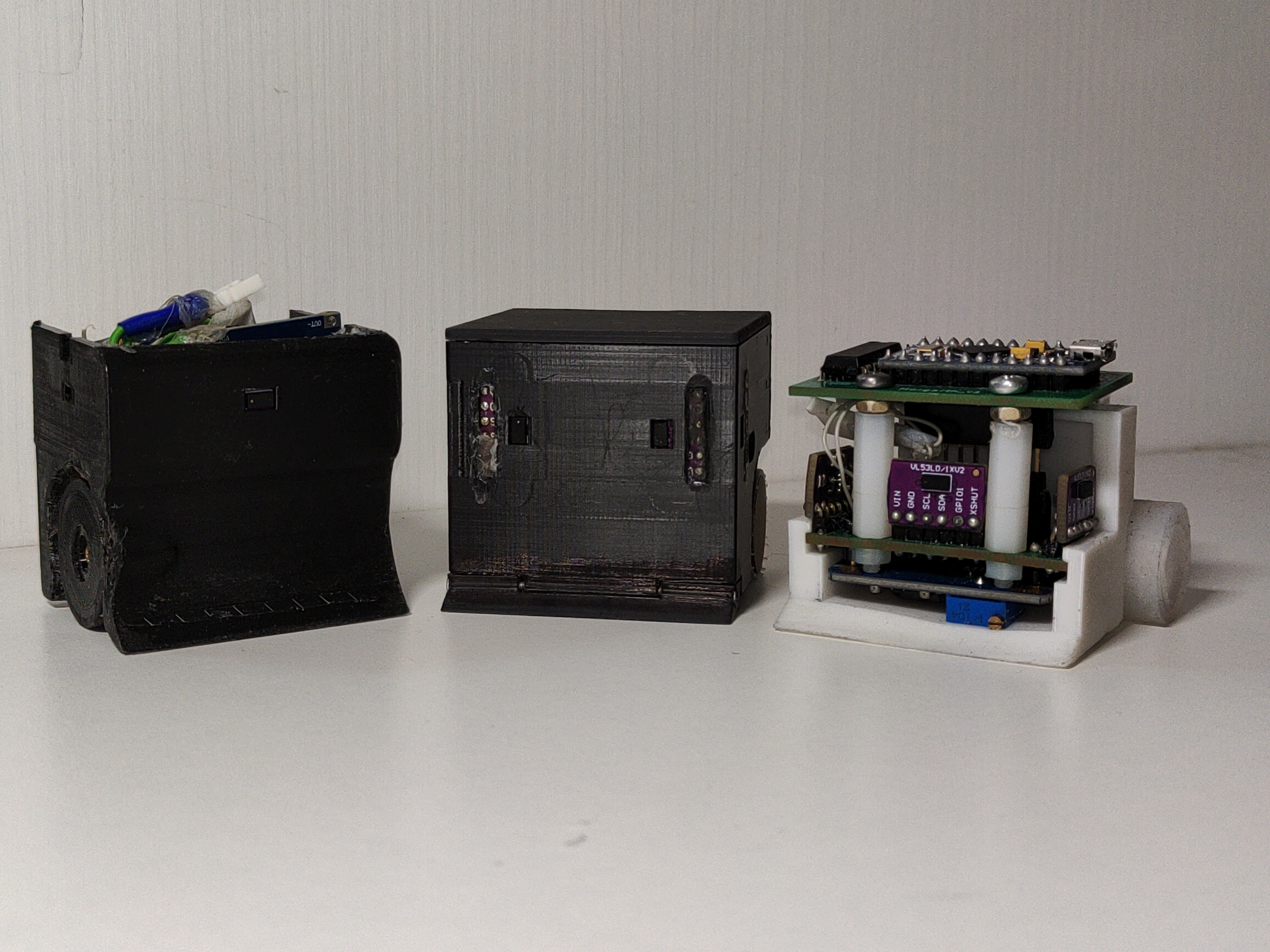
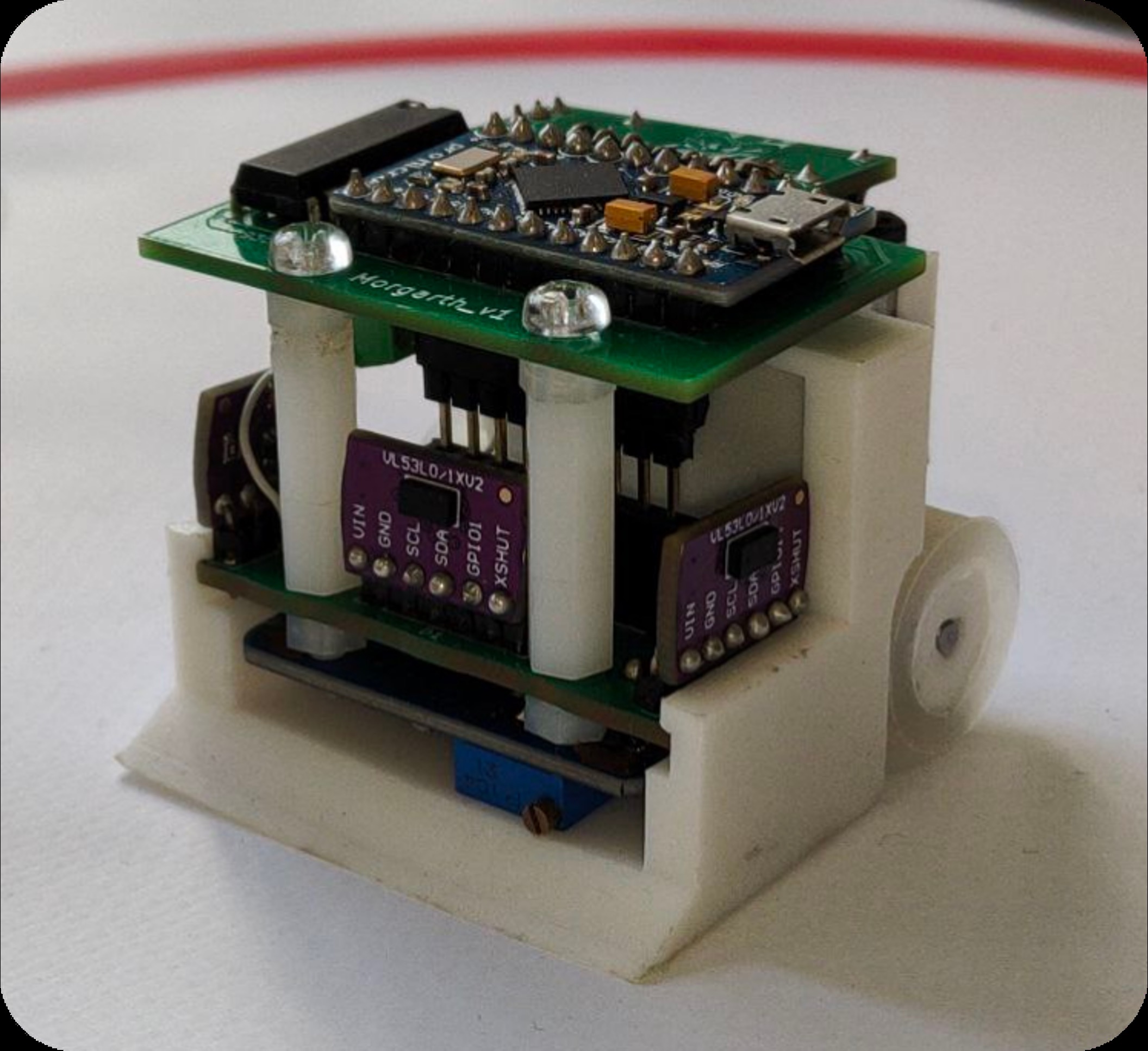
6. Третья версия — N20 горизонтально и ИК-сенсоры
Концепция: горизонтальное расположение моторов для лучшего распределения нагрузки, замена лазеров на ИК-датчики для повышения надёжности.
Технические решения:
- Движение: моторы N20 горизонтально
- Навигация: 4 инфракрасных датчика (более широкий угол обзора)
- Колёса: диаметр 2 см
- Монтаж: 2 печатных платы (оптимизация по весу)
- Питание: отточенная схема с минимальными потерями
Результат: наиболее сбалансированная конструкция из трёх.
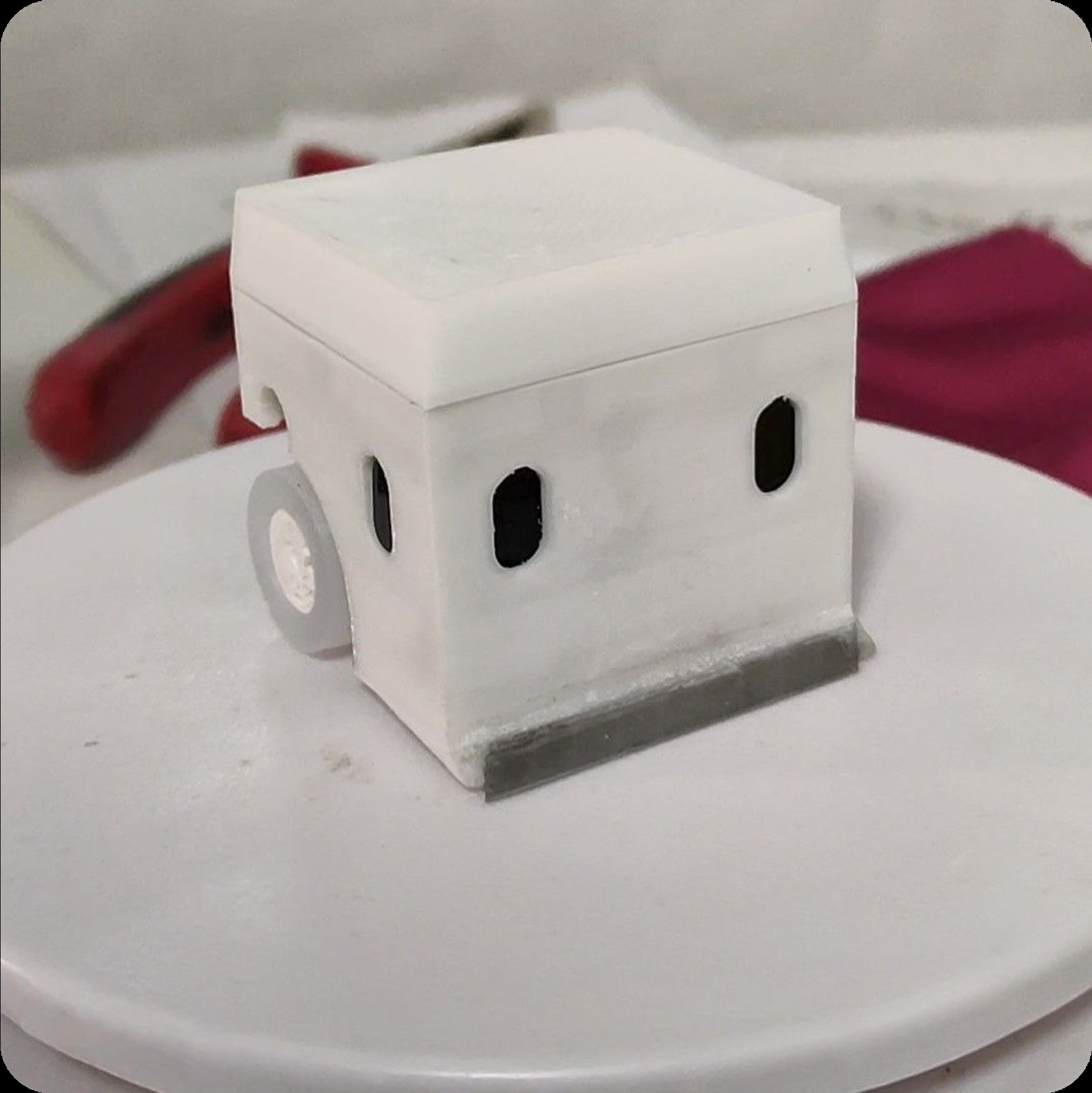
6.1 Модификация третьей версии — Робот «Атом»
На базе третьей версии была создана модификация — робот «Атом»:
- Модифицированный отвал — заточенная геометрия для подбивания под робота соперника
- Тонкие шины — снижение веса при сохранении сцепления
- Лазерные датчики (возврат) — более точное определение противника на расстоянии
- Магнитные крышки — быстрая замена и модульность без инструментов


7. Бои — записи поединков
8. Достижения

Помимо этого, команда занимала призовые места на городских и всероссийских соревнованиях по робототехнике.
9. Авторы проекта


Итоги
Проект наглядно демонстрирует ключевой принцип инженерии: итеративная разработка — единственный путь к оптимальному решению. Каждое поколение роботов Радомира и Тимура было лучше предыдущего не случайно, а в результате анализа ошибок и осознанного применения новых технических подходов. Результат — чемпионский уровень в одной из самых технически требовательных дисциплин школьной робототехники.