Проект ученика 9 класса Скибы Радомира Александровича (ГБОУ Школа №2009) под руководством Мырадова Мырата Вепаевича.
Эта работа — не просто создание робота, а глубокое инженерное исследование. Проект направлен на решение проблемы дефицита доступного и профессионального учебного оборудования, которое могло бы полноценно готовить студентов к работе в современной промышленности.

1. Исследование и концепция
Большинство дешевых учебных манипуляторов имеют грузоподъемность до 250 г и радиус зоны до 30 см, при этом они лишены возможности полноценной интеграции с ROS.
Техническое задание проекта Радомира:
- Оси: 4 независимых степени свободы.
- Грузоподъемность: не менее 800 грамм (факт — свыше 1 кг).
- Радиус рабочей зоны: более 50 см.
- Стек: Полная интеграция с ROS 2 Humble.
- Механика: Собственные безлюфтовые редукторы.
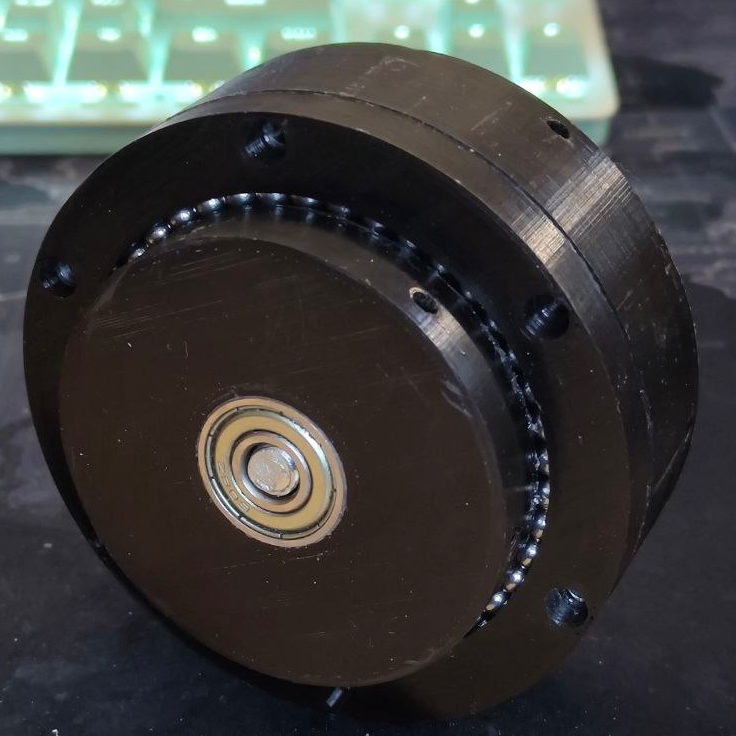
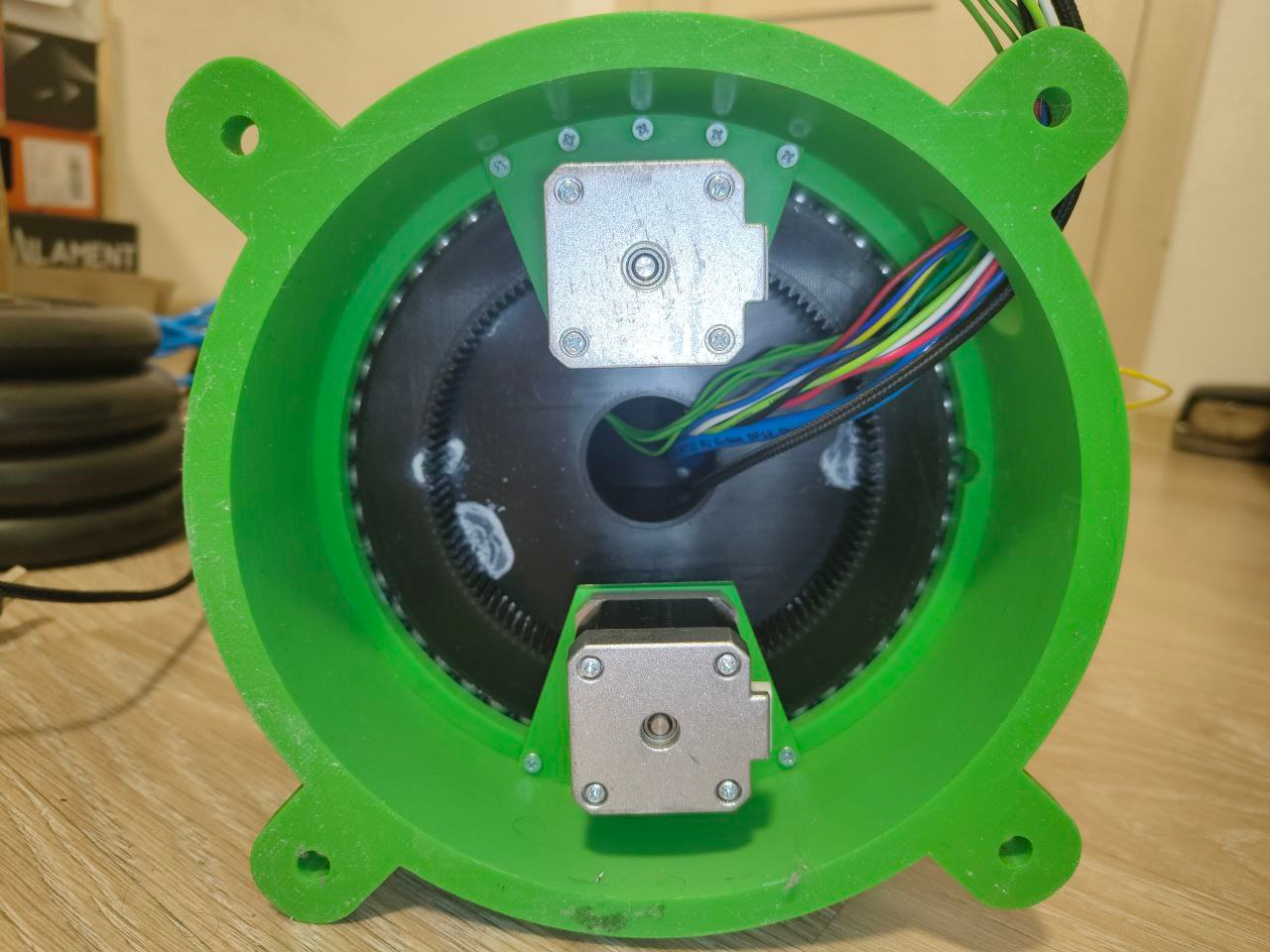
2. Сердце механики: Циклоидальный редуктор
Для обеспечения высокого крутящего момента при компактных размерах был выбран тип циклоидального редуктора (передаточное число 1:15). Родомир самостоятельно спроектировал и рассчитал геометрию диска во Fusion 360.
Инновации в конструкции:
- Гибридные материалы: Корпус и циклоидальный диск напечатаны из PLA-пластика, но кольцевые штифты изготовлены из алюминиевых трубок для снижения трения и повышения ресурса.
- Безподшипниковая база: Применено нестандартное решение — вместо тяжелых промышленных подшипников на ведомом валу использованы металлические шарики 5 мм в специально спроектированных пазах.
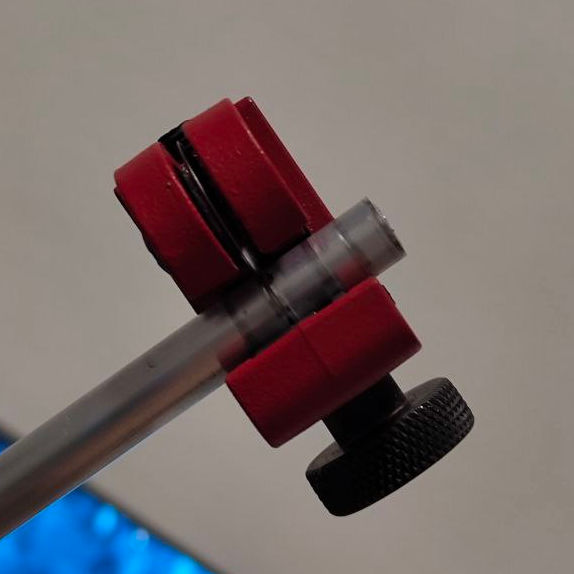
- Тестирование КПД: Для проверки расчетов был собран отдельный измерительный стенд. Экспериментально подтвержденный КПД составил 81%.
3. Расчет и электродинамика
Для выбора двигателей был проведен детальный расчет крутящих моментов с учетом длин звеньев и веса груза. Суммарный момент на системе составил 22.7 Н⋅м. С учетом КПД и передаточного числа, был выбран двигатель Nema 23 с моментом 2.2 Н⋅м для первого звена.
Система питания:
- 36V 6A: Питание силовых двигателей Nema 23.
- 12V 8A: Питание двигателей Nema 17.
- 5V 6A: Питание вычислительного узла и датчиков.


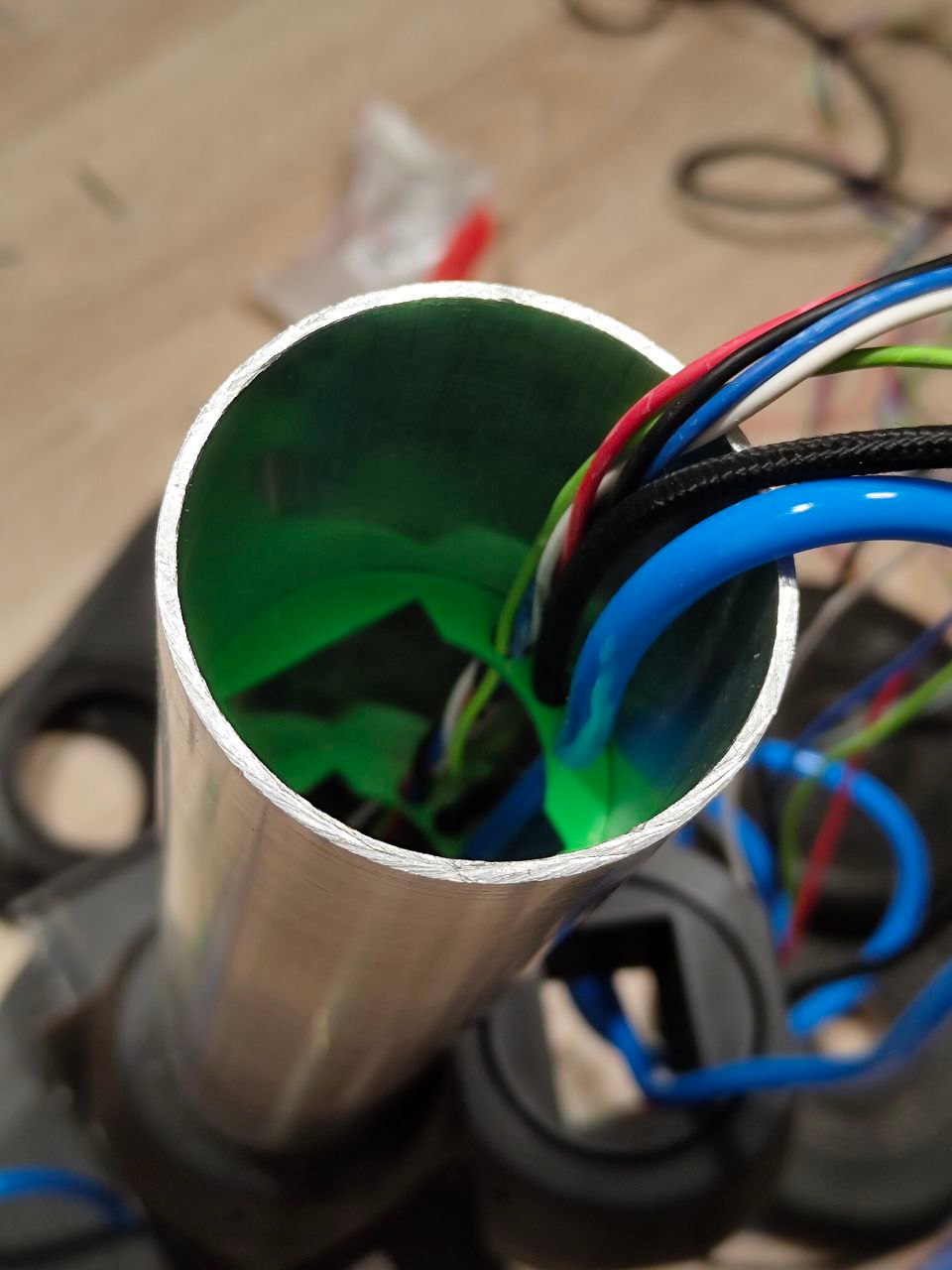
4. Процесс сборки и монтажа
Конструкция сочетает 3D-печать и алюминиевый профиль (труба 60 мм). Внутри труб проходят не только провода, но и ременные передачи, что позволило вынести тяжелые двигатели в основание робота.
- Этап 1: Сборка поворотного стола на шарикоподшипниковой базе.
- Этап 2: Установка направляющих для кабелей и пневматической трубки захвата.
- Этап 3: Монтаж магнитных энкодеров AS5600 на каждую ось для контроля углов.
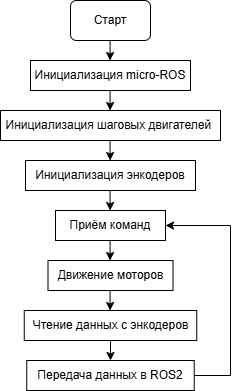

5. Программный комплекс и ROS 2
Управление роботом реализовано по двухуровневой архитектуре: Nvidia Jetson Nano (High-Level) и ESP32 (Low-Level).
Логика управления:
На Jetson Nano развернут ROS 2 Humble и фреймворк MoveIt 2, который отвечает за планирование траекторий. ESP32 принимает команды по UART и транслирует их в Step/Dir сигналы для драйверов.
🎥 Демонстрация работы и сборка
Ниже представлены видеоматериалы, демонстрирующие процесс сборки и финальный результат работы манипулятора.
🏁 Итоги разработки
Манипулятор Скибы Радомира — это полноценный инженерный продукт. Проект доказал, что школьники способны решать задачи промышленного уровня, интегрируя сложные механические решения с передовым ПО для робототехники.