Обзор
PCA9685 — это мощный 16-канальный ШИМ-контроллер с 12-битным разрешением, управляемый по интерфейсу I2C. Он идеально подходит для управления множеством сервоприводов, светодиодов и других устройств, требующих точного управления длительностью импульса.
PCA9685 позволяет освободить ресурсы микроконтроллера, взяв на себя генерацию 16 независимых ШИМ-сигналов. Благодаря возможности менять I2C адрес, можно объединить до 62 таких модулей на одной шине, управляя почти 1000 сервоприводами.
Библиотеки
О PCA9685 16-Channel 12-bit PWM Driver
Модуль обладает следующими ключевыми особенностями:
- 16 каналов для одновременного управления сервоприводами или яркостью светодиодов.
- 12-битное разрешение (4096 шагов), что обеспечивает плавное движение серво.
- Настраиваемая частота ШИМ (от 24 Гц до 1526 Гц).
- Каскадирование: до 62 модулей на одной шине (до 992 выходов).
- Питание: логика 2.3V–5.5V, силовое питание до 6V.
Характеристики
Характеристики PCA9685
Полные технические параметры модуля для проектирования ваших систем.
Распиновка PCA9685
Модуль имеет разъемы для подключения к контроллеру и отдельный терминал для силового питания сервоприводов.
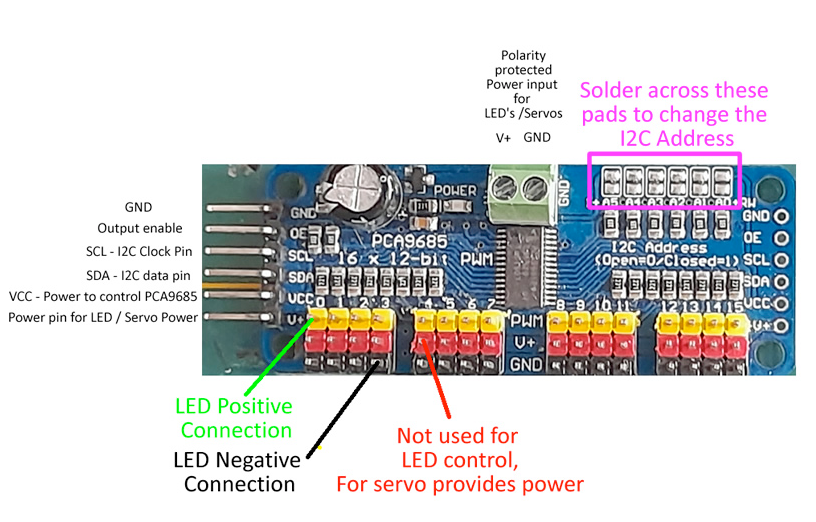
Совет по питанию
Для управления сервоприводами обязательно подключайте внешнее питание 5V через клеммник. Не используйте 5V пин Arduino для питания мощных нагрузок.
| Пин | Тип | Описание |
|---|---|---|
| VCC | Power | Питание логики (3.3В - 5В) |
| GND | GND | Общий провод |
| SDA | I2C | Данные I2C |
| SCL | I2C | Такты I2C |
| V+ | Power | Внешнее питание нагрузок (до 6В) |
| OE | Control | Output Enable (инверсный) |
Подключение PCA9685 к ESP32
Для работы с ESP32 используйте стандартные пины I2C (GPIO 21 и 22) и не забудьте соединить земли (GND) внешнего блока питания и контроллера.
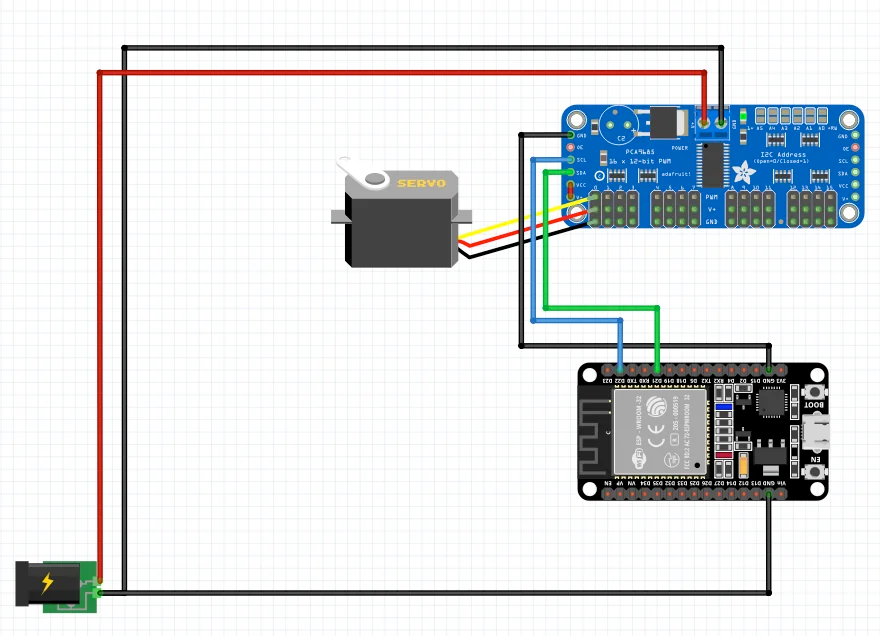
| PCA9685 | ESP32 Пин | Примечание |
|---|---|---|
| VCC | 3.3V | Только логика! |
| GND | GND | Общая земля |
| SDA | GPIO 21 | Data |
| SCL | GPIO 22 | Clock |
| V+ | Ext. 5V-6V | Для сервоприводов |
Устранение неполадок
Сервоприводы дрожат или не двигаются
Сервоприводы дрожат или не двигаются
Чаще всего это связано с недостаточным током питания. Один сервопривод может потреблять до 500-1000мА при старте. Используйте мощный внешний БП (5V 2A и выше). Также убедитесь, что земли (GND) БП и микроконтроллера соединены.
Устройство не найдено на шине I2C
Устройство не найдено на шине I2C
Проверьте адрес модуля с помощью I2C сканера. По умолчанию адрес 0x40. Убедитесь, что SDA и SCL подключены правильно (не перепутаны местами) и имеют надежный контакт.
Примеры программирования PCA9685
Ниже приведены примеры для популярных платформ и языков программирования.

Arduino IDE
C++ Framework • Библиотека Adafruit PWM
Код примера
Arduino IDE
C++ Framework • Библиотека Adafruit PWM
#include <Wire.h>
#include <Adafruit_PWMServoDriver.h>
// Создаем объект PCA9685
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver();
#define SERVOMIN 150 // Минимальная длина импульса
#define SERVOMAX 600 // Максимальная длина импульса
#define SERVO_FREQ 50 // Частота для аналоговых серво (50 Гц)
void setup() {
Serial.begin(115200);
pwm.begin();
pwm.setPWMFreq(SERVO_FREQ);
}
void loop() {
// Двигаем серво на канале 0 туда-обратно
for (int pulselen = SERVOMIN; pulselen <= SERVOMAX; pulselen++) {
pwm.setPWM(0, 0, pulselen);
delay(10);
}
for (int pulselen = SERVOMAX; pulselen >= SERVOMIN; pulselen--) {
pwm.setPWM(0, 0, pulselen);
delay(10);
}
}

MicroPython
Python • Библиотека pca9685
Код примера
MicroPython
Python • Библиотека pca9685
from machine import Pin, I2C
from pca9685 import PCA9685
import time
# Инициализация I2C
i2c = I2C(0, scl=Pin(22), sda=Pin(21), freq=100000)
# Инициализация PCA9685
pwm = PCA9685(i2c)
pwm.freq(50)
while True:
# Пример управления каналом 0
pwm.duty(0, 150) # Минимум
time.sleep(1)
pwm.duty(0, 600) # Максимум
time.sleep(1)Итоги
PCA9685 — это стандарт де-факто для робототехники на базе ESP32 и Arduino.
- Рекомендация: Используйте электролитический конденсатор (470-1000 мкФ) на силовом входе модуля для сглаживания скачков напряжения.
- Безопасность: Следите за нагревом модуля при работе с мощными светодиодами, суммарный ток на чип не должен превышать 400 мА.
Готовы собрать своего робота?
Используйте PCA9685 для управления всеми сервоприводами вашего проекта через всего два провода I2C.