Обзор
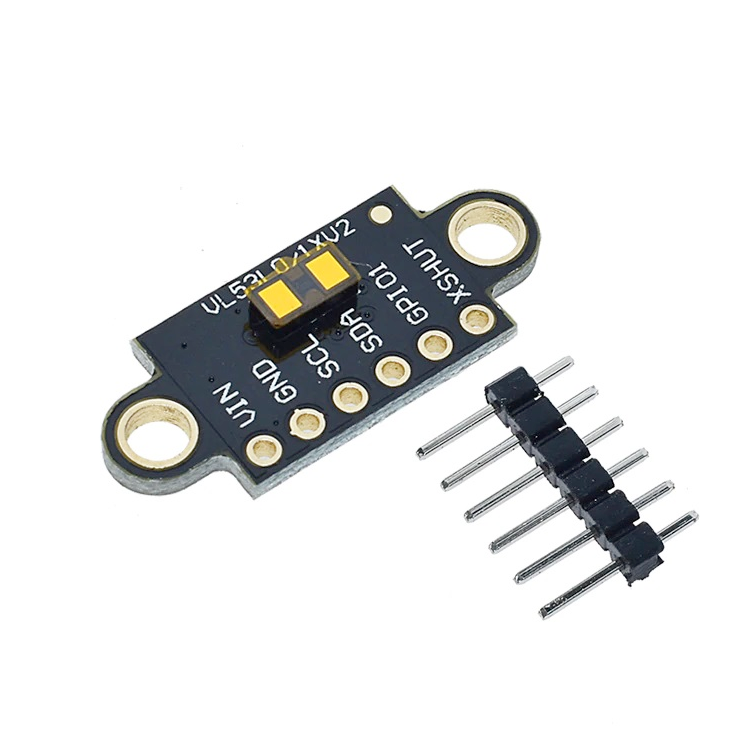
VL6180X — это датчик приближения и освещённости ближнего действия, который объединяет 3-в-1 систему: ИК-излучатель, сенсор и процессор измерения расстояния. Идеален для распознавания жестов, обнаружения присутствия и компактных робототехнических проектов.
VL6180X — это датчик приближения и освещённости ближнего действия с технологией Time-of-Flight (ToF). Он объединяет в себе ИК-излучатель, сенсор и процессор измерения расстояния. Отлично подходит для распознавания жестов, обнаружения присутствия и компактных робототехнических проектов.






О датчике VL6180X Time-of-Flight
📏 Обзор датчика VL6180X
- Диапазон: 0–50 см (макс.)
- Интерфейс: I²C цифровая связь
- Разрешение: точность 1 мм
- Угол обзора: 25°
- Рабочее напряжение: 2,8В–5В (через встроенный регулятор)
- Типичный ток: ~20–30 мА
- Длина волны: 850 нм ИК
- Встроенный датчик освещённости (ALS)
Приобретите VL6180X
Характеристики VL6180X
Полные технические характеристики датчика VL6180X Time-of-Flight.
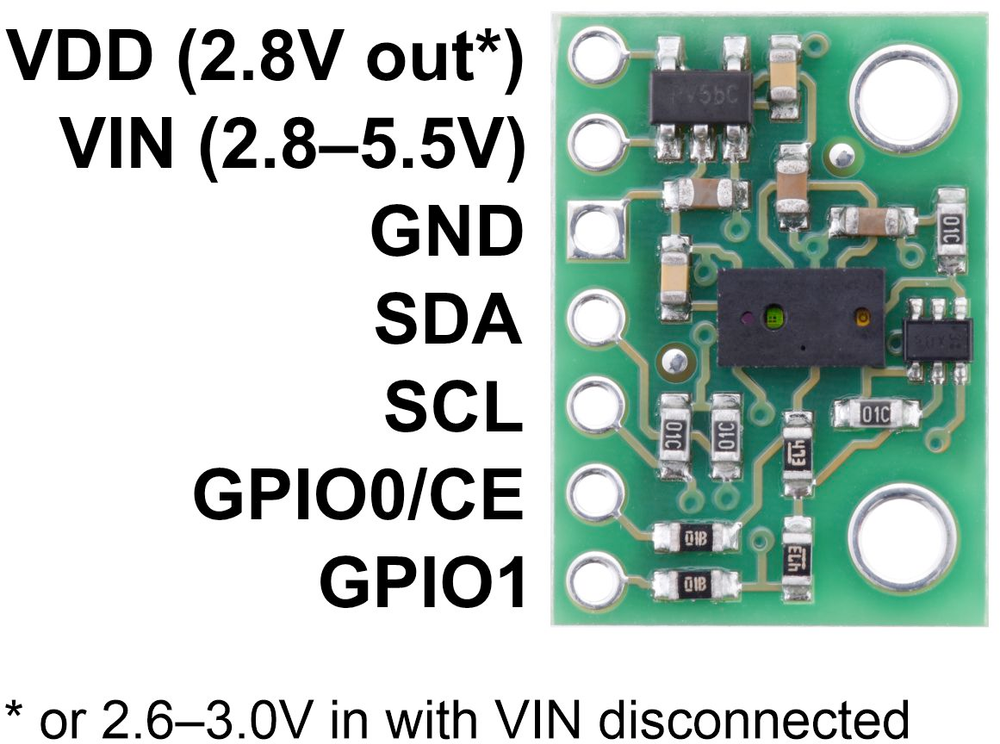
Распиновка VL6180X
Распиновка VL6180X включает выводы для I2C связи (SDA, SCL), питания (VIN, GND), выключения (SHDN), прерывания (GPIO) и регулятора 2,8В для датчика приближения ближнего действия и определения освещённости.
- Датчик ближнего действия — 0–20 см (лучше для обнаружения приближения)
- Адрес I2C — 0x29 (как у VL53L0X и VL53L1X)
- Встроенный ALS — датчик освещённости для измерения света
| № | Название | Тип | Описание | Примечания |
|---|---|---|---|---|
| 1 | VIN | Питание | Вход питания (2,8В–5В) | Встроенный регулятор поддерживает широкий диапазон |
| 2 | GND | Земля | Подключение земли | Общая земля |
| 3 | SDA | I2C Data | Линия данных I2C | Двунаправленная (нужна подтяжка) |
| 4 | SCL | I2C Clock | Тактовая линия I2C | Тактовый сигнал (нужна подтяжка) |
| 5 | SHDN | Управление | Выключение (активный низкий) | Подтянуть к высокому для включения датчика |
| 6 | GPIO | Прерывание | Вывод прерывания или общего ввода/вывода | Опционально для прерываний или оповещений |
| 7 | 2v8 | Питание Out | Регулируемый выход 2,8В | Может питать внешние компоненты |
Подключение VL6180X к ESP32
Подключите VL6180X к ESP32 по I2C (выводы SDA и SCL). Этот датчик сочетает измерение расстояния методом ToF ближнего действия (до 20 см) со встроенным датчиком освещённости. Встроенный регулятор принимает входное напряжение 2,8В–5В.
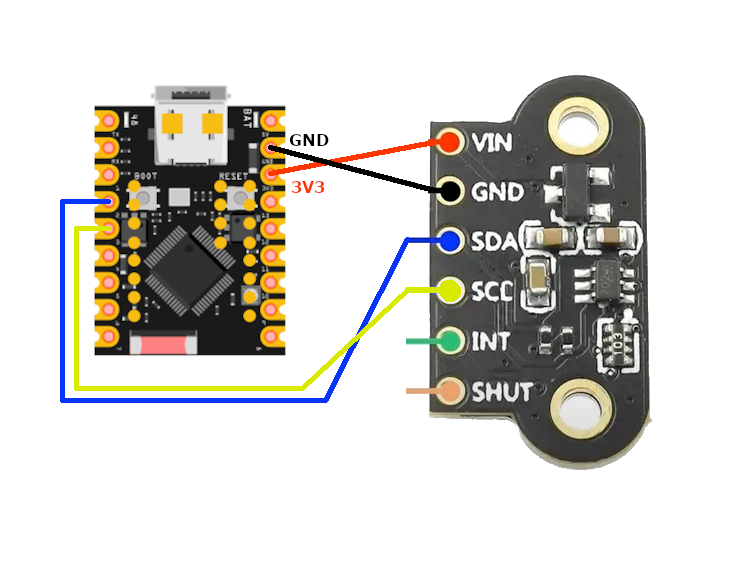
| Вывод VL6180X | Подключение | Вывод ESP32 | Описание |
|---|---|---|---|
| VIN обязательно | → | 3.3V или 5V | Питание (2,8В–5В) |
| GND обязательно | → | GND | Общая земля |
| SDA обязательно | → | GPIO21 | Линия данных I2C (с подтяжкой) |
| SCL обязательно | → | GPIO22 | Тактовая линия I2C (с подтяжкой) |
| SHDN опционально | → | 3.3V или GPIO | Управление выключением (подтянуть к высокому для включения) |
| GPIO опционально | → | GPIO (опционально) | Выход прерывания/оповещения |
Устранение неполадок VL6180X
Распространённые проблемы и решения, которые помогут запустить датчик.
Датчик не определяется
Датчик не отвечает или библиотека Adafruit не может его обнаружить
Проблема: датчик не отвечает или библиотека Adafruit не может его обнаружить.
Решение: проверьте подключение проводов, уровень питания и убедитесь, что вывод SHDN подтянут к высокому уровню.
Расстояние застревает на нуле или максимуме
Постоянно возвращает 0 мм или 50 мм
Проблема: постоянно возвращает 0 мм или 50 мм.
Решение: убедитесь, что объект находится в пределах дальности и датчик направлен прямо на него. Проверьте отражательную способность поверхности.
Нестабильное питание
Плавающие или нестабильные показания
Проблема: плавающие или хаотичные показания.
Решение: используйте чистый источник питания 3,3В/5В и развязывающий конденсатор. Избегайте подключения SHDN к плавающему выводу.
Советы по отладке
Serial монитор
Проверка логов и ошибок
Проверка напряжения
Мультиметр и целостность цепи
Дополнительные ресурсы
Примеры программирования VL6180X
Готовые к использованию примеры кода для различных платформ и фреймворков
Пример для Arduino
Совместим с Arduino IDE и платами ESP32
C++
Пример для Arduino
Совместим с Arduino IDE и платами ESP32
#include <Wire.h>
#include <Adafruit_VL6180X.h>
// Создаём экземпляр датчика VL6180X
Adafruit_VL6180X vl = Adafruit_VL6180X();
void setup() {
Serial.begin(115200);
// Ожидание запуска последовательного порта
while (!Serial) {
delay(1);
}
Serial.println("VL6180X тест!");
// Проверка наличия датчика
if (!vl.begin()) {
Serial.println("Ошибка: датчик VL6180X не найден!");
while (1);
}
Serial.println("Датчик найден!");
}
void loop() {
// Чтение расстояния
uint8_t range = vl.readRange();
uint8_t status = vl.readRangeStatus();
// Проверка статуса
if (status == VL6180X_ERROR_NONE) {
Serial.print("Расстояние: ");
Serial.print(range);
Serial.println(" мм");
} else {
// Обработка ошибок
Serial.print("Ошибка: ");
Serial.println(status);
}
// Чтение освещённости (Lux)
float lux = vl.readLux(VL6180X_ALS_GAIN_1);
Serial.print("Освещённость: ");
Serial.print(lux);
Serial.println(" lux");
delay(100);
}Этот код использует библиотеку Adafruit_VL6180X для измерения расстояния и освещённости. Подключите датчик по I2C (SDA → GPIO21, SCL → GPIO22 на ESP32).
Пример для ESP-IDF
Официальный фреймворк ESP32
C/C++
Пример для ESP-IDF
Официальный фреймворк ESP32
#include <stdio.h>
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "esp_err.h"
#include "driver/i2c.h"
#include "vl6180x.h"
// Конфигурация I2C
#define I2C_MASTER_SCL_IO 22
#define I2C_MASTER_SDA_IO 21
#define I2C_MASTER_FREQ_HZ 100000
// Адрес датчика VL6180X
#define VL6180X_I2C_ADDRESS 0x29
// Инициализация I2C
esp_err_t i2c_init(void) {
i2c_config_t conf = {
.mode = I2C_MODE_MASTER,
.sda_io_num = I2C_MASTER_SDA_IO,
.scl_io_num = I2C_MASTER_SCL_IO,
.sda_pullup_en = GPIO_PULLUP_ENABLE,
.scl_pullup_en = GPIO_PULLUP_ENABLE,
.master.clk_speed = I2C_MASTER_FREQ_HZ,
};
esp_err_t err = i2c_param_config(I2C_NUM_0, &conf);
if (err != ESP_OK) return err;
return i2c_driver_install(I2C_NUM_0, I2C_MODE_MASTER, 0, 0, 0);
}
void vl6180x_task(void *pvParameters) {
// Инициализация датчика
vl6180x_init();
while (1) {
// Чтение расстояния
uint8_t range = vl6180x_read_range();
printf("Расстояние: %d мм\n", range);
// Чтение освещённости
uint16_t als = vl6180x_read_als();
printf("Освещённость: %d люкс\n", als);
vTaskDelay(pdMS_TO_TICKS(100));
}
}
void app_main(void) {
i2c_init();
xTaskCreate(vl6180x_task, "vl6180x_task", 4096, NULL, 5, NULL);
}Пример показывает базовую инициализацию VL6180X в ESP-IDF. Для полной работы потребуется библиотека VL6180X или собственный драйвер.
Пример для ESPHome
Для умного дома и Home Assistant
YAML
Пример для ESPHome
Для умного дома и Home Assistant
# Конфигурация ESPHome для VL6180X
# Примечание: ESPHome не имеет встроенной поддержки VL6180X
# Используйте custom компонент или I2C датчик с similar протоколом
i2c:
sda: GPIO21
scl: GPIO22
scan: true
# Пример использования с виртуальным датчиком
sensor:
- platform: template
name: "VL6180X Расстояние"
id: distance_sensor
unit_of_measurement: "мм"
accuracy_decimals: 0
- platform: template
name: "VL6180X Освещённость"
id: light_sensor
unit_of_measurement: "lux"
accuracy_decimals: 1
# Для полной поддержки VL6180X требуется custom componentVL6180X не имеет встроенной поддержки в ESPHome. Для использования потребуется создать custom component или использовать альтернативный датчик.
Пример для PlatformIO
Современная среда разработки для MCU
Arduino
Пример для PlatformIO
Современная среда разработки для MCU
platformio.ini:
[env:esp32dev]
platform = espressif32
board = esp32dev
framework = arduino
lib_deps = adafruit/Adafruit VL6180X Library@^1.0.2
monitor_speed = 115200main.cpp:
#include <Arduino.h>
#include <Wire.h>
#include <Adafruit_VL6180X.h>
Adafruit_VL6180X vl;
void setup() {
Serial.begin(115200);
if (!vl.begin()) {
Serial.println("Ошибка: датчик VL6180X не найден!");
while (1);
}
Serial.println("VL6180X инициализирован!");
}
void loop() {
uint8_t range = vl.readRange();
uint8_t status = vl.readRangeStatus();
if (status == VL6180X_ERROR_NONE) {
Serial.printf("Расстояние: %d мм\n", range);
}
float lux = vl.readLux(VL6180X_ALS_GAIN_1);
Serial.printf("Освещённость: %.1f lux\n", lux);
delay(100);
}PlatformIO автоматически установит библиотеку Adafruit_VL6180X из lib_deps. Код идентичен примеру для Arduino.
Пример для MicroPython
Python для микроконтроллеров
Python
Пример для MicroPython
Python для микроконтроллеров
# VL6180X на MicroPython
# Требуется драйвер I2C и библиотека для VL6180X
from machine import I2C, Pin
import time
# Настройка I2C
i2c = I2C(0, scl=Pin(22), sda=Pin(21), freq=100000)
# Адрес VL6180X по умолчанию
VL6180X_ADDRESS = 0x29
# Регистры датчика
VL6180X_REG_IDENTIFICATION_MODEL_ID = 0x000
VL6180X_REG_RESULT_RANGE_STATUS = 0x04D
def read_distance():
"""Чтение расстояния от датчика VL6180X"""
try:
# Чтение регистра статуса
status = i2c.readfrom_mem(VL6180X_ADDRESS, VL6180X_REG_RESULT_RANGE_STATUS, 1)
# Проверка статуса
if status[0] & 0x01:
# Чтение результата измерения
range_data = i2c.readfrom_mem(VL6180X_ADDRESS, 0x062, 1)
return range_data[0]
except Exception as e:
print(f"Ошибка чтения: {e}")
return None
def check_sensor():
"""Проверка подключения датчика"""
devices = i2c.scan()
if VL6180X_ADDRESS in devices:
print("Датчик VL6180X найден!")
return True
else:
print("Датчик VL6180X не найден!")
return False
# Основной цикл
if check_sensor():
while True:
distance = read_distance()
if distance is not None:
print(f"Расстояние: {distance} мм")
time.sleep_ms(100)MicroPython требует низкоуровневого доступа к регистрам датчика. Приведённый пример показывает базовую работу с I2C.
Итоги
Рекомендации
ESP32 VL6180X Time-of-Flight Sensor — это мощный датчик расстояния, который обеспечивает отличную производительность и надёжность. С поддержкой нескольких платформ разработки, включая Arduino, ESP-IDF, ESPHome, PlatformIO и MicroPython, это универсальный выбор для ваших IoT-проектов.
Всегда проверяйте требования к питанию и подключению пинов перед включением проекта, чтобы избежать возможных повреждений.
Готовы начать?
Теперь, когда у вас есть вся необходимая информация, пришло время интегрировать VL6180X в ваш ESP32 проект и воплотить свои идеи в жизнь!
Похожие варианты
Ищете альтернативы VL6180X? Ознакомьтесь с похожими датчиками, которые могут подойти для вашего проекта.

Водонепроницаемый ультразвуковой датчик расстояния, идеальный для наружного применения.

Модуль-адаптер для датчика VL53L0X Time-of-Flight от STMicroelectronics.
Высокоточный лазерный датчик измерения дальности от STMicroelectronics.