Обзор
A02YYUW — это высококачественный водонепроницаемый ультразвуковой датчик расстояния, предназначенный для работы в суровых промышленных и уличных условиях. Благодаря степени защиты IP67, он устойчив к воздействию воды и пыли, что делает его идеальным решением для мониторинга уровня жидкости, обнаружения объектов на открытом воздухе и систем предотвращения столкновений. Датчик использует интерфейс UART для передачи данных, обеспечивая высокую точность и стабильность измерений.
A02YYUW — это надежный ультразвуковой модуль с интерфейсом UART, специально разработанный для работы в условиях высокой влажности и загрязнения. Он обеспечивает точные измерения на расстоянии от 3 см до 450 см с разрешением 1 мм, что позволяет использовать его в самых ответственных проектах автоматизации и робототехники.




Приобретите A02YYUW
Характеристики A02YYUW
Полные технические характеристики водонепроницаемого ультразвукового датчика расстояния A02YYUW.
Распиновка A02YYUW
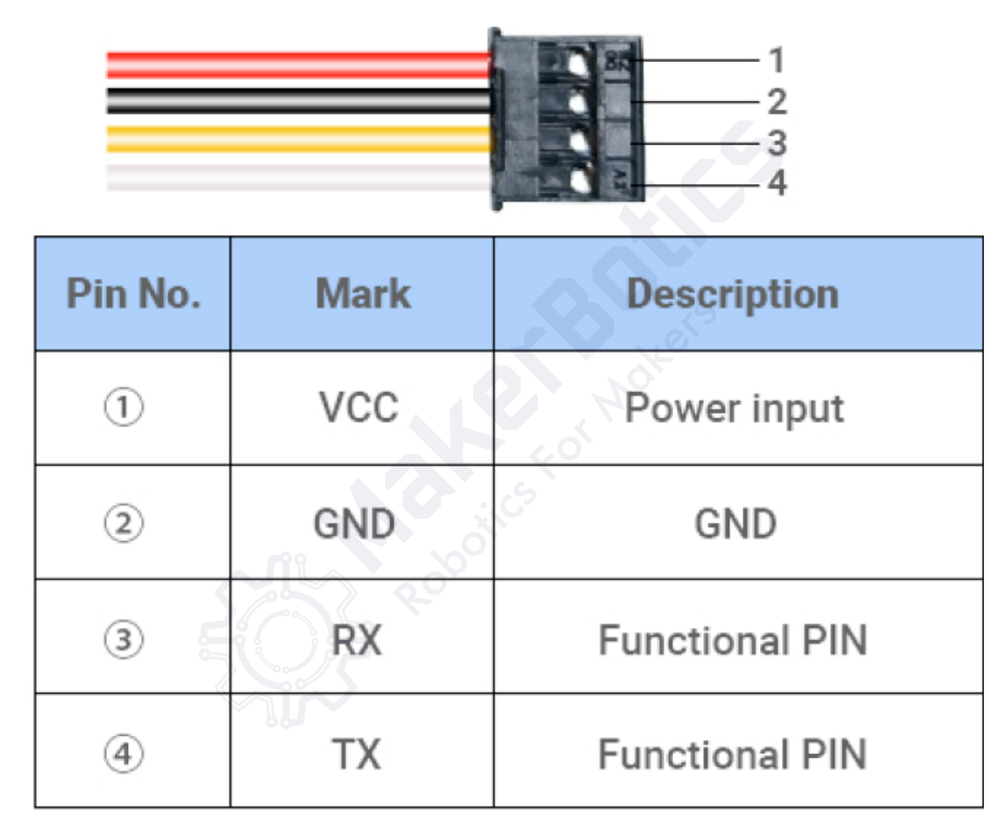
Датчик имеет 4-контактный разъем. Для корректной работы необходимо подключить питание и линии UART TX/RX.
- Используйте 9600 бод для стабильной связи.
- Стартовый байт всегда 0xFF.
- Контрольная сумма в 4-м байте.
| № | Название | Тип | Описание | Примечание |
|---|---|---|---|---|
| 1 | VCC | Питание | Вход напряжения (3.3–5.5 В) | Рекомендуется 5 В |
| 2 | GND | Земля | Общий минус питания | Общий GND |
| 3 | TX | UART TX | Передача данных от датчика | К RX микроконтроллера |
| 4 | RX | UART RX | Прием данных (опционально) | Для настройки или команд |
Подключение A02YYUW
Для подключения A02YYUW к ESP32 или Arduino используйте соответствующие пины UART. Не забудьте соединить GND датчика и микроконтроллера.
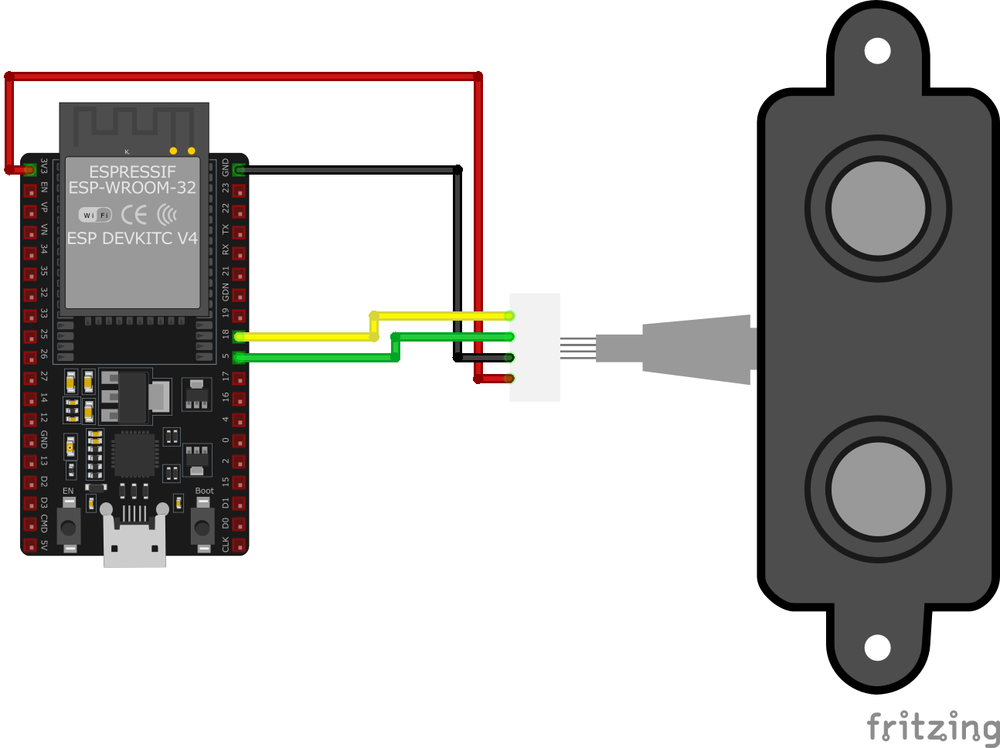
| A02YYUW Pin | Направление | МК Pin (ESP32) | Описание |
|---|---|---|---|
| VCC | ← | 5V | Питание датчика |
| GND | ↔ | GND | Общая земля |
| TX | → | GPIO16 (RX2) | Передача данных от датчика |
| RX | ← | GPIO17 (TX2) | Прием данных (не обязателен) |
Устранение неполадок A02YYUW
Если ваш датчик работает некорректно, проверьте следующие распространенные проблемы.
Датчик возвращает нулевые или случайные данные
Нет стабильных показаний расстояния
Причина: Недостаточное питание или помехи в кабеле.
Решение: Убедитесь, что на датчик подается стабильное питание 5В. Проверьте надежность соединений UART. Если кабель длинный, используйте витую пару или экранированный провод.
Ошибка контрольной суммы (Checksum error)
Данные приходят, но они повреждены
Причина: Проблемы в логике чтения UART или электрические шумы.
Решение: Проверьте код обработки контрольной суммы. Убедитесь, что вы читаете точно 4 байта и начинаете со стартового байта 0xFF. Добавьте фильтрующий конденсатор 100нФ параллельно питанию датчика.
Примеры кода A02YYUW
Ниже приведены проверенные примеры кода для работы с датчиком на различных платформах.

Arduino / ESP32
Чтение через HardwareSerial
C++
Arduino / ESP32
Чтение через HardwareSerial
#include <Arduino.h>
// Используем UART2 на ESP32/ESP8266
// Подключение: МК RX (16) <- Датчик TX
#define RXD2 16
#define TXD2 17
HardwareSerial mySerial(2);
unsigned char data[4] = {0};
float distance;
void setup() {
Serial.begin(115200);
mySerial.begin(9600, SERIAL_8N1, RXD2, TXD2);
}
void loop() {
if (mySerial.available()) {
if (mySerial.read() == 0xff) { // Стартовый байт
data[0] = 0xff;
for (int i = 1; i < 4; i++) {
data[i] = mySerial.read();
}
// Расчет контрольной суммы
int sum = (data[0] + data[1] + data[2]) & 0x00FF;
if (sum == data[3]) {
distance = (data[1] << 8) + data[2];
Serial.print("Расстояние: ");
Serial.print(distance / 10); // В см
Serial.println(" см");
}
}
}
delay(100);
}Этот код инициализирует последовательный интерфейс на скорости 9600 бод и считывает пакет из 4 байт. После проверки контрольной суммы значение переводится в сантиметры и выводится в монитор порта.

MicroPython
Универсальный скрипт для ESP32
Python
MicroPython
Универсальный скрипт для ESP32
from machine import UART
import time
# UART на ESP32 (TX=17, RX=16)
uart = UART(2, baudrate=9600, rx=16, tx=17)
while True:
if uart.any() >= 4:
data = uart.read(4)
if data[0] == 0xFF:
checksum = (data[0] + data[1] + data[2]) & 0xFF
if checksum == data[3]:
distance = (data[1] << 8) + data[2]
print("Расстояние: {} см".format(distance / 10))
else:
print("Ошибка CRC")
time.sleep(0.1)Скрипт читает входящие байты из буфера UART и выполняет валидацию пакета. Преимущество MicroPython — в простоте отладки “на лету”.
Итоги A02YYUW
Датчик A02YYUW является отличным выбором для проектов умного дома и систем мониторинга, где требуется защита от влаги. Его легко подключить к любому микроконтроллеру с поддержкой UART, а стабильный протокол обмена данными гарантирует точность измерений.
Рекомендации
Используйте питание 5В для обеспечения максимальной дальности измерения (до 4.5 метров). При монтаже убедитесь, что перед сенсором нет препятствий в радиусе 30-40 градусов.
Безопасность
Не погружайте датчик полностью под воду на длительное время. Степень IP67 защищает от брызг и кратковременных погружений, но не гарантирует работу при постоянном давлении воды.
Изучите альтернативные датчики
Если вам нужны другие характеристики или интерфейсы, обратите внимание на следующие модели.
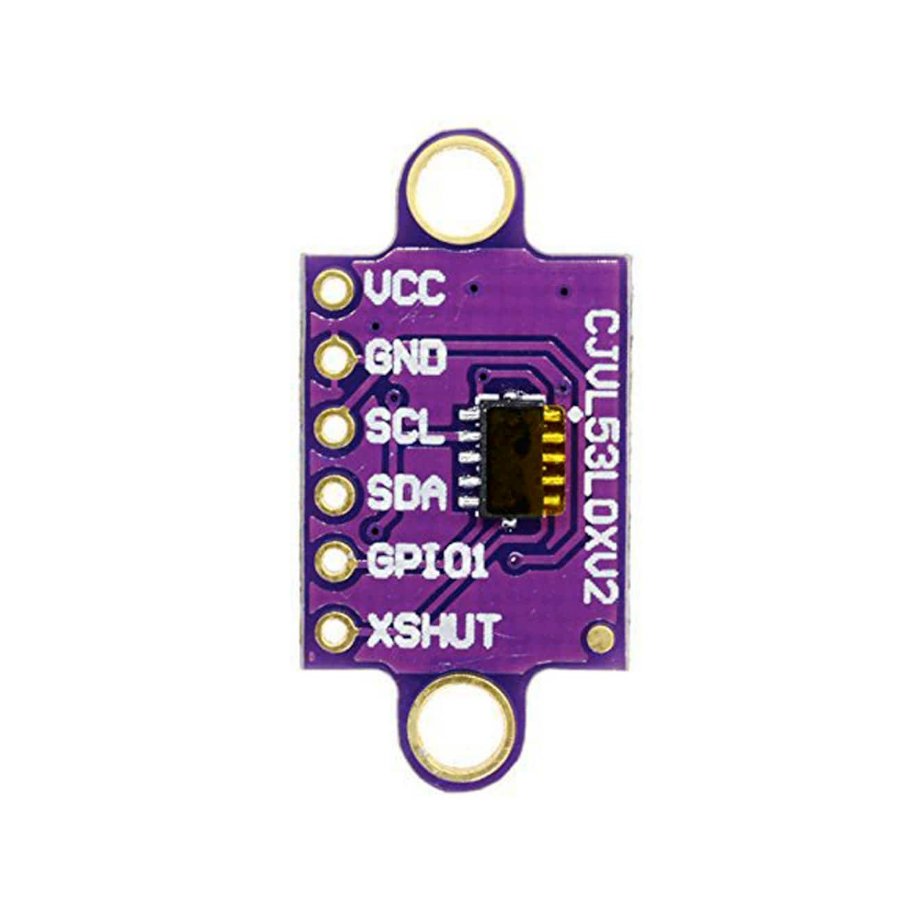
VL53L0X Time-of-Flight
Высокоточный лазерный датчик расстояния TOF с интерфейсом I2C и дальностью до 2 метров.
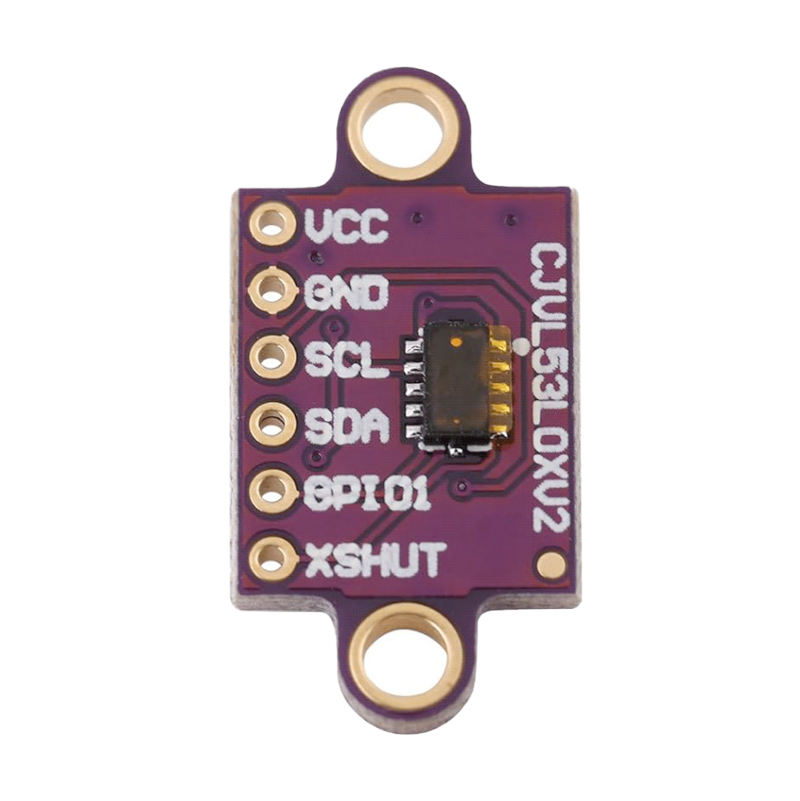
VL53L0X V2 Time-of-Flight
Вторая версия популярного лазерного датчика с улучшенной оптикой и повышенной точностью.

TOF200C Time-of-Flight
Компактный лазерный дальномер TOF200C для работы в условиях ограниченного пространства.