Обзор
MG996R — это мощный сервопривод с металлическим редуктором и высоким крутящим моментом, который идеально подходит для робототехники, радиоуправляемых моделей и серьезных DIY-проектов. Работает при напряжении от 4.8В до 7.2В, обеспечивая крутящий момент до 11 кг·см при 6В. Его надежность и прочность делают его отличным выбором для создания манипуляторов и систем рулевого управления.
MG996R — это усиленный сервопривод с металлическими шестернями и высоким крутящим моментом. Он обеспечивает надежное управление в условиях высоких нагрузок, что делает его де-факто стандартом для робо-рук, шасси роботов и авиамоделей.






О сервоприводе MG996R
MG996R — это высокомоментный сервопривод с железными шестернями, разработанный для робототехники, RC-моделей и тяжелых нагрузок. Благодаря полностью металлическому редуктору и мощному двигателю, он обеспечивает стабильную работу там, где пластиковые микро-сервоприводы (например, SG90) могут выйти из строя.
⚡ Ключевые особенности
- Рабочее напряжение: 4.8В – 7.2В
- Крутящий момент: До 11 кг·см при 6В
- Угловой диапазон: ~120° (по 60° в каждую сторону)
- Управление PWM: 1мс (0°), 1.5мс (центр), 2мс (макс. позиция)
- Шестерни: Металлические для максимальной долговечности
- Применение: Идеален для робо-рук, поворотных механизмов камер и моделей 1:10.
Ищете другие варианты? Посмотрите наш гид по популярным сервоприводам для ESP32. 🚀
Приобретите MG996R
Характеристики MG996R
Полные технические характеристики сервопривода MG996R.
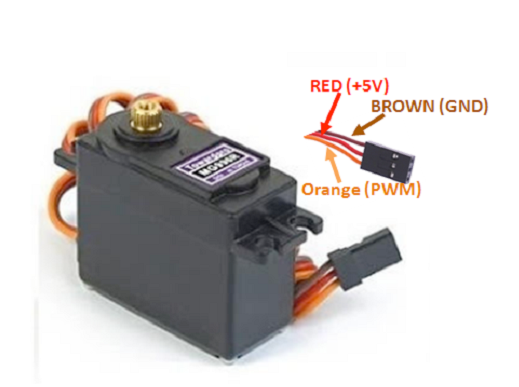
Распиновка MG996R
MG996R поставляется со стандартным 3-контактным разъемом. Цветовая кодировка проводов: коричневый (земля), красный (питание) и оранжевый (управляющий сигнал ШИМ).
- Ток потребления — может достигать 2.5А.
- Питание — не используйте 5В от ESP32/Arduino.
- Металлические шестерни — выдерживают ударные нагрузки.
| Цвет | Название | Тип | Описание | Примечания |
|---|---|---|---|---|
| Коричневый | GND | Земля | Общий минус схемы | Общая земля с контроллером |
| Красный | +5V | Питание | 4.8В – 7.2В | Нужен внешний БП (мин. 2А) |
| Оранжевый | DATA | Signal | Управляющий сигнал PWM | К любому PWM GPIO (напр. GPIO18) |
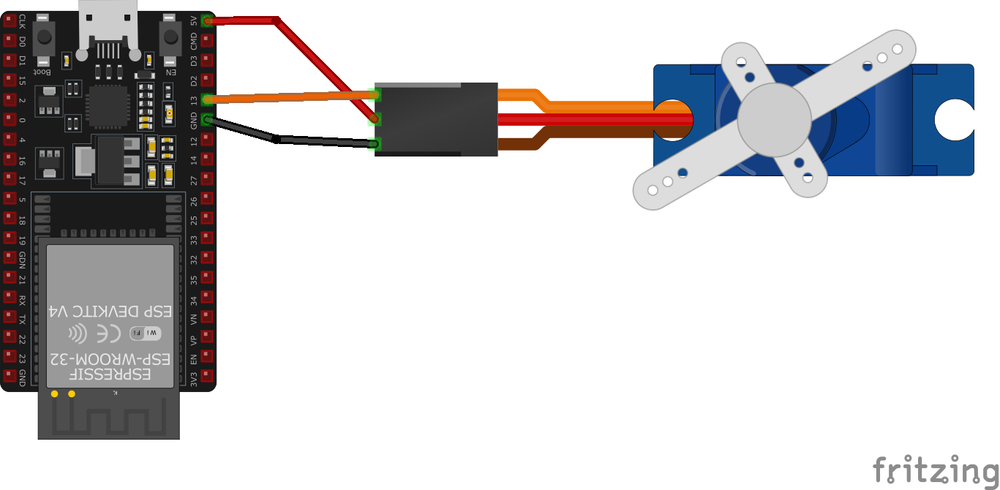
Подключение MG996R к ESP32
Для управления MG996R с помощью ESP32 подключите коричневый провод к GND, красный к внешнему источнику питания 5-7.2В (НЕ к ESP32), а оранжевый — к пину GPIO с поддержкой ШИМ.
| Провод серво | Подключение | Вывод контроллера | Описание |
|---|---|---|---|
| Коричневый обязательно | → | GND | Общий минус источника и ESP32 |
| Красный обязательно | → | +Внешний БП | Внешние 5-7.2В (не пин 5V ESP32!) |
| Оранжевый обязательно | → | GPIO 18 | Сигнал ШИМ для управления углом |
Устранение неполадок MG996R
Распространённые проблемы и способы их решения при работе с мощными сервоприводами.
Сервопривод не двигается или дергается
Самая частая проблема с MG996R
Проблема: Сервопривод издает гул, вибрирует или не реагирует на команды.
Причина: Недостаточный ток питания. Пиковый ток MG996R может достигать 2.5А, что превышает возможности USB порта или пина 5V на плате контроллера.
Решение: Подключите сервопривод к отдельному блоку питания или мощному аккумулятору. Не забудьте соединить GND источника питания с GND контроллера.
Сильный перегрев мотора
Перегрузка или заклинивание
Причина: Сервопривод пытается достичь позиции, которую физически не может занять из-за препятствия или слишком тяжелой нагрузки (Stall current).
Решение: Проверьте механику проекта. Ограничьте программно углы поворота в коде, чтобы сервопривод не упирался в механические ограничители.
Дрожание при отсутствии движения (Jitter)
Электрические шумы или нестабильный ШИМ
Решение: Добавьте электролитический конденсатор (напр. 1000мкФ 16В) на линию питания сервопривода как можно ближе к мотору. Убедитесь, что управляющий провод не проходит рядом с силовыми кабелями.
Советы по отладке
Проверка мультиметром
Проверка просадок напряжения
Дополнительные ресурсы
Примеры программирования MG996R
Готовые решения для управления сервоприводами на различных платформах.
Пример для Arduino
Использование стандартной библиотеки ESP32Servo
C++
Пример для Arduino
Использование стандартной библиотеки ESP32Servo
#include <ESP32Servo.h>
// Создаем объект для управления сервоприводом
Servo myServo;
// Пин управления (выберите GPIO с поддержкой ШИМ)
int servoPin = 18;
void setup() {
// Настройка Serial Monitor
Serial.begin(115200);
// Разрешаем использование всех таймеров для ШИМ на ESP32
ESP32PWM::allocateTimer(0);
ESP32PWM::allocateTimer(1);
ESP32PWM::allocateTimer(2);
ESP32PWM::allocateTimer(3);
// Устанавливаем частоту ШИМ (стандарт для серво - 50Гц)
myServo.setPeriodHertz(50);
// Подключаем серво на GPIO 18, задаем длительность импульсов в микросекундах
// Для MG996R обычно 500-2400 или 1000-2000 мкс
myServo.attach(servoPin, 500, 2400);
Serial.println("Сервопривод MG996R готов к работе!");
}
void loop() {
// Плавное вращение от 0 до 180 градусов
for (int pos = 0; pos <= 180; pos += 1) {
myServo.write(pos); // Устанавливаем позицию
delay(15); // Ждем завершения движения
}
// Плавное вращение обратно от 180 до 0 градусов
for (int pos = 180; pos >= 0; pos -= 1) {
myServo.write(pos);
delay(15);
}
}Этот скетч использует популярную библиотеку ESP32Servo. Для MG996R важно правильно настроить диапазон импульсов в функции attach(). Мы используем стандартные 500-2400 мкс, чтобы охватить полный угловой диапазон сервопривода.
Пример для ESPHome
Интеграция в Home Assistant
YAML
Пример для ESPHome
Интеграция в Home Assistant
servo:
- id: robotic_arm_servo
output: pwm_output
output:
- platform: esp32_ledc
pin: GPIO18
frequency: 50Hz
id: pwm_output
# Пример управления через ползунок (Number)
number:
- platform: template
name: "Угол поворота серво"
min_value: -100%
max_value: 100%
step: 1%
optimistic: true
on_value:
then:
- servo.write:
id: robotic_arm_servo
level: !lambda 'return x / 100.0;'В ESPHome сервопривод настраивается через компонент управления ШИМ ledc. Мы задаем частоту 50Гц. Обратите внимание, что управление осуществляется через уровень (level) от -1.0 до 1.0.
Пример для MicroPython
Управление через встроенный модуль PWM
Python
Пример для MicroPython
Управление через встроенный модуль PWM
from machine import Pin, PWM
import time
# Инициализация ШИМ на GPIO 18
servo = PWM(Pin(18))
servo.freq(50) # Стандартная частота 50Гц
def set_angle(angle):
# Преобразование угла 0-180 в рабочий диапазон ШИМ
# Обычно duty 20-120 (от 2% до 12% цикла при 1024-битной точности)
# Формула может варьироваться для разных моделей MG996R
duty = int((angle / 180) * 102 + 25)
servo.duty(duty)
# Цикл поворота
while True:
set_angle(0)
time.sleep(1)
set_angle(90)
time.sleep(1)
set_angle(180)
time.sleep(1)В MicroPython на ESP32 мы используем класс PWM модуля machine. Функция set_angle() помогает упростить управление, пересчитывая градусы в значения рабочего цикла.
Итоги MG996R
Сервопривод **MG996R** — это «рабочая лошадка» доступной робототехники. Несмотря на свою невысокую цену, он обеспечивает внушительный крутящий момент и долговечность благодаря металлическим шестерням. Совместимость со всеми популярными платформами разработки делает его универсальным инструментом для инженеров любого уровня.
Рекомендации
Всегда используйте внешнее питание 6В для достижения максимального крутящего момента. Никогда не пытайтесь вращать качалку серво рукой при включенном питании — это может повредить внутреннюю электронику или шестерни при резком сопротивлении.
Безопасность
Берегите пальцы! Высокий крутящий момент MG996R легко может нанести травму. При использовании в подвижных конструкциях предусматривайте защитные кожухи и системы аварийного отключения питания.
Готовы к сборке?
Теперь у вас есть все чертежи и коды. Интегрируйте MG996R в ваш следующий проект на ESP32 и создавайте удивительные механизмы!
Похожие решения
Нужно что-то покомпактнее или, наоборот, функциональнее? Посмотрите на эти варианты сервоприводов и драйверов.

MG90S Mini Servo
MG90S — это надежный микросервопривод с металлическим редуктором для небольших роботов и дронов...
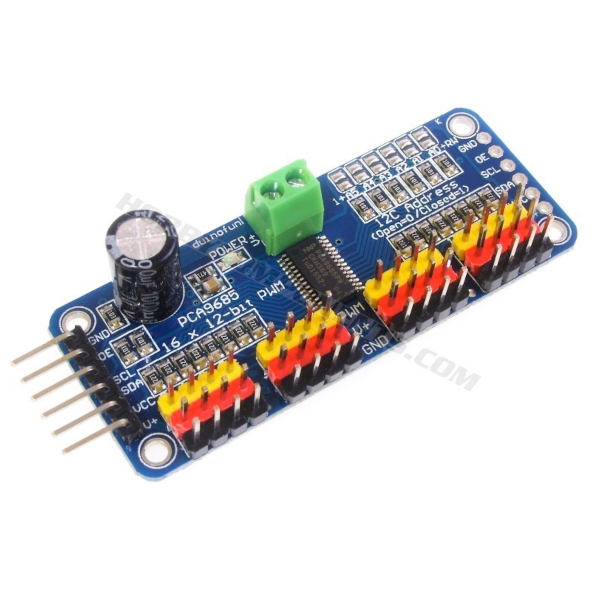
PCA9685 16-Channel Servo Driver
Драйвер для одновременного управления до 16 сервоприводами по протоколу I2C. Идеален для гексаподов...