Обзор
MG90S — это надежный микросервопривод, разработанный для робототехники и DIY-проектов. Работая при напряжении от 4.8В до 6В, он обеспечивает крутящий момент до 2.2 кг·см, с диапазоном поворота от 0° до 180°, управляемым с помощью ШИМ-сигналов (PWM). Благодаря весу 13.4 г, прочным металлическим шестерням и компактным размерам (22.8 мм x 12.2 мм x 31 мм), он идеально подходит для приложений, требующих повышенного крутящего момента и надежности.
MG90S — это микросервопривод с металлическим редуктором, широко используемый в робототехнике, радиоуправляемых моделях и DIY-электронике. Он превосходит аналоги с пластиковыми шестернями (такие как SG90) по прочности и крутящему моменту.






О мини-сервоприводе MG90S
MG90S — это микросервопривод с металлическим редуктором, широко востребованный в робототехнике, радиоуправляемых авиамоделях и DIY-проектах. Благодаря высокому крутящему моменту и долговечности, он значительно превосходит бюджетные сервоприводы с нейлоновыми шестернями, такие как SG90.
⚡ Ключевые особенности
- Рабочее напряжение: 4.8В - 6В.
- Крутящий момент: до 2.2 кг·см при 4.8В.
- Угловой диапазон: от 0° до 180° (управление по ШИМ).
- Ширина импульса: 1мс (0°), 1.5мс (90°), 2мс (180°).
- Вес: ~13.4 г.
- Размеры: 22.8 мм x 12.2 мм x 31 мм.
- Металлические шестерни: обеспечивают высокую прочность и длительный срок службы.
Приобретите MG90S
Характеристики MG90S
Полные технические характеристики мини-сервопривода MG90S.
Распиновка MG90S
MG90S — это 3-проводной сервопривод с выводами GND (коричневый), +5V (красный) и DATA (оранжевый).
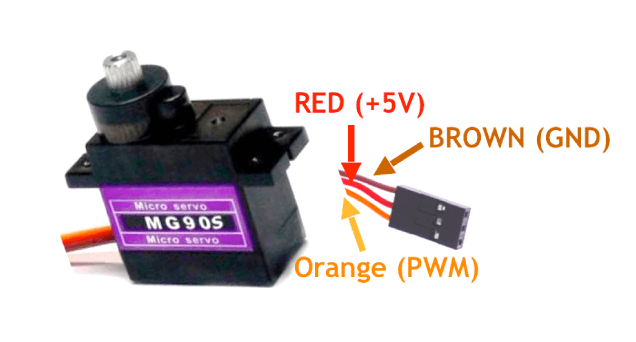
- Коричневый — Земля (GND).
- Красный — Питание (+5V).
- Оранжевый — Сигнал (DATA).
- Редуктор — Металлический для надежности.
| Цвет | Название | Тип | Описание | Примечания |
|---|---|---|---|---|
| Коричневый | GND | Земля | Подключение к земле ESP32 или минусу внешнего питания. | Замыкает электрическую цепь. |
| Красный | +5V | Питание | Вход питания (4.8В-6В). Для малых нагрузок можно от вывода 5V ESP32. | Используйте внешний блок питания при высоких нагрузках. |
| Оранжевый | DATA | ШИМ | Управляющий сигнал. Ширина: 1мс (0°), 1.5мс (90°), 2мс (180°). | Подключайте к GPIO с поддержкой ШИМ (например, GPIO 18). |
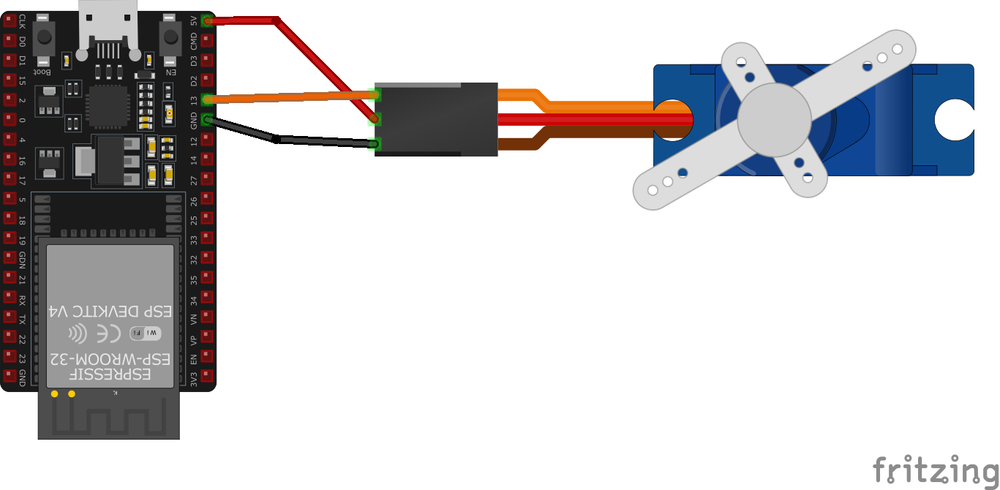
Подключение MG90S к ESP32
Чтобы управлять сервоприводом MG90S с помощью ESP32, подключите коричневый провод к GND, красный — к 5V, а оранжевый — к GPIO выводу с поддержкой ШИМ.
| Вывод MG90S | Подключение | Вывод ESP32 | Описание |
|---|---|---|---|
| GND (коричневый) обязательно | → | GND | Общая земля (GND) для питания и сигнала. |
| +5V (красный) обязательно | → | 5V или внешнее питание | Питание (4.8-6В). Для нескольких серво используйте внешний БП. |
| обязательно | → | GPIO 18 | Сигнал управления ШИМ (50 Гц, импульс 1-2мс). |
Устранение неполадок MG90S
Типичные проблемы и способы их решения для корректной работы сервопривода.
Серво вращается непрерывно
Вместо того чтобы занять заданную позицию
Проблема: MG90S вращается на 360 градусов без остановки.
Причины: использование версии с непрерывным вращением (360°) или неверные параметры ШИМ-сигнала.
Решение: убедитесь, что ваш экземпляр — стандартный позиционный сервопривод (180°). Проверьте код: ширина импульсов должна быть строго в пределах спецификаций (обычно 1-2 мс).
Ограниченный диапазон поворота
Серво не доходит до 180°
Проблема: сервопривод поворачивается меньше чем на 180 градусов.
Решение: откалибруйте параметры ШИМ. Для MG90S полный диапазон часто достигается при импульсах от 0.8 мс до 2.1 мс. Также проверьте механические препятствия.
Дрожание (дерганье) сервопривода
Дребезжание при работе или в покое
Причины: помехи в сигнале, нестабильное питание, отсутствие общей земли.
Решение: используйте внешний источник питания (не только от USB). Добавьте электролитический конденсатор (например, 100-470 мкФ) между шинами питания VCC и GND сервопривода.
Советы по отладке
Serial монитор
Проверка выполнения кода
Проверка мультиметром
Напряжение и пульсации
Дополнительные ресурсы
Примеры программирования MG90S
Готовые к использованию примеры кода для различных платформ.
Arduino IDE
C++ Framework: универсальный пример для ESP32 и Arduino
C++
Arduino IDE
C++ Framework: универсальный пример для ESP32 и Arduino
/*
* Пример управления сервоприводом MG90S для ESP32/Arduino
*/
#include <ESP32Servo.h> // Библиотека для работы с серво на ESP32
Servo myServo; // Создаем объект сервопривода
int servoPin = 18; // Пин управления (ШИМ)
void setup() {
Serial.begin(115200);
// Разрешаем использование всех таймеров
ESP32PWM::allocateTimer(0);
ESP32PWM::allocateTimer(1);
ESP32PWM::allocateTimer(2);
ESP32PWM::allocateTimer(3);
myServo.setPeriodHertz(50); // Стандартная частота 50 Гц
myServo.attach(servoPin, 500, 2400); // Подключаем пин, мин и макс импульс (в мкс)
}
void loop() {
// Плавный поворот от 0 до 180 градусов
for (int pos = 0; pos <= 180; pos += 1) {
myServo.write(pos); // Устанавливаем позицию
delay(15); // Ждем завершения движения
}
// Плавный возврат от 180 до 0 градусов
for (int pos = 180; pos >= 0; pos -= 1) {
myServo.write(pos);
delay(15);
}
}Этот код использует библиотеку ESP32Servo для точного управления ШИМ-сигналом. Вызов myServo.attach(pin, 500, 2400) позволяет откалибровать крайние положения сервопривода MG90S для достижения полного диапазона 180 градусов.
ESP-IDF
Native Framework для профессиональной разработки
C++
ESP-IDF
Native Framework для профессиональной разработки
ESPHome
YAML Конфигурация для Home Assistant
YAML
ESPHome
YAML Конфигурация для Home Assistant
MicroPython
Python Framework для микроконтроллеров
Python
MicroPython
Python Framework для микроконтроллеров
Итоги MG90S
Мини-сервопривод **MG90S** — это мощное и надежное устройство, обеспечивающее отличную производительность в компактном корпусе. Благодаря металлическим шестерням и поддержке множества платформ разработки (Arduino, ESP-IDF, ESPHome, MicroPython), это универсальный выбор для задач, где требуется точность и долговечность.
Рекомендации
Для оптимальной работы обеспечьте качественное питание. При подключении нескольких сервоприводов используйте внешний источник 5В-6В и не забудьте соединить земли (GND) внешнего блока и ESP32.
Безопасность
Всегда проверяйте полярность питания перед включением. Металлические шестерни прочнее пластиковых, но все же старайтесь не подвергать привод ударным нагрузкам выше заявленного крутящего момента.
Готовы приступить к сборке?
Теперь у вас есть вся информация для того, чтобы внедрить **MG90S** в ваш следующий проект на ESP32!
Изучите альтернативные приводы

MG996R — мощный сервопривод
MG996R — высокомощный сервопривод для серьезных робототехнических проектов. Усилие до 11 кг·см.

Общая информация по сервоприводам
Основы работы, управления и подключения стандартных ШИМ-сервоприводов.
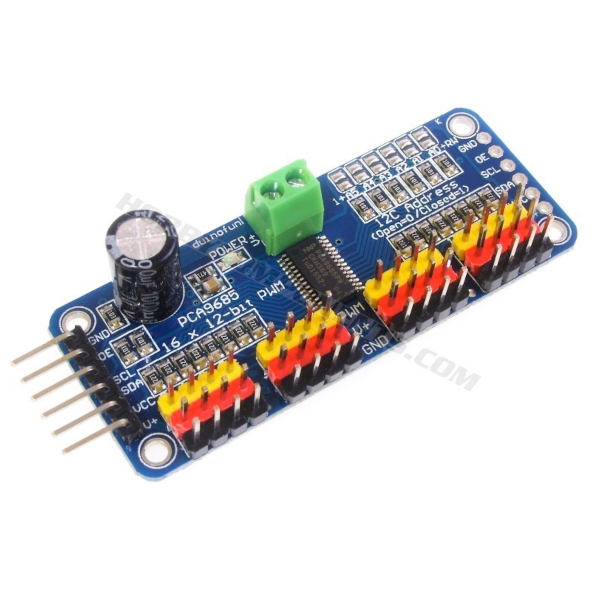
PCA9685 — 16-канальный драйвер
Позволяет управлять до 16 сервоприводами одновременно по шине I2C.