Обзор
Сервоприводы — это универсальные моторы, которые обеспечивают точное угловое позиционирование и широко используются в робототехнике, RC-моделях и различных DIY-проектах. Они управляются с помощью сигналов PWM (широтно-импульсная модуляция), что позволяет точно контролировать положение вала.
Сервоприводы идеально подходят для создания роботизированных манипуляторов, систем наклона и поворота камер, автоматических дверей и радиоуправляемых транспортных средств. ESP32 с его множественными PWM-каналами и библиотека Arduino Servo позволяют легко управлять несколькими моторами одновременно.
Сервоприводы — это моторы с обратной связью по положению, которые позволяют точно управлять углом поворота вала. Они широко применяются в робототехнике, автоматизации, RC-моделях и различных проектах, где требуется точное позиционирование.






О сервоприводах
Сервоприводы — это универсальные моторы, которые являются неотъемлемой частью современной робототехники и автоматизации. Они работают на основе сигналов PWM (широтно-импульсная модуляция) для управления положением или скоростью вала. Эти устройства обеспечивают точное позиционирование и широко используются как в любительских проектах, так и в промышленных приложениях.
⚡ Популярные модели сервоприводов
- SG90 — лёгкий микро сервопривод с нейлоновыми шестернями, идеален для маломощных приложений. Обеспечивает крутящий момент 1.8 кг·см при питании 4.8-6В.
- MG90S — микро сервопривод с металлическими шестернями, улучшенный крутящий момент и долговечность. Крутящий момент до 2.2 кг·см.
- MG996R — высокомоментный сервопривод с металлическими шестернями для тяжёлых задач. Крутящий момент до 11 кг·см при питании 4.8-7.2В.
- PCA9685 — 16-канальный 12-битный PWM контроллер для управления множеством сервоприводов через интерфейс I2C.
🔧 Типы сервоприводов
- Позиционные сервоприводы — поворачиваются на заданный угол (обычно 0°-180°) и удерживают положение
- Сервоприводы непрерывного вращения — вращаются непрерывно в любую сторону со скоростью, зависящей от ширины импульса
- Цифровые сервоприводы — используют цифровой процессор для более точного управления и быстрой реакции
- Аналоговые сервоприводы — классический тип с аналоговой электроникой управления
Приобретите сервоприводы
Характеристики сервоприводов
Общие технические характеристики для типичных PWM сервоприводов (параметры могут отличаться в зависимости от модели).
Распиновка сервоприводов
Большинство PWM сервоприводов имеют 3 провода: землю (GND), питание (VCC) и сигнал управления (DATA/Signal). Цвета проводов могут отличаться в зависимости от производителя.
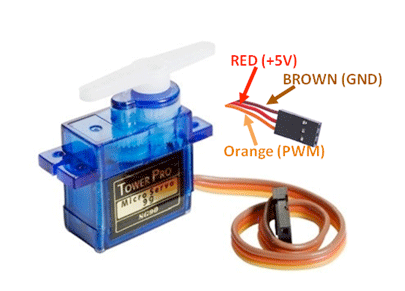
- Цвета проводов: коричневый/чёрный (GND), красный (VCC), оранжевый/жёлтый/белый (Signal)
- Частота PWM: 50Гц (период 20мс)
- Ширина импульса: 1мс (0°) – 2мс (180°)
- Нейлоновые шестерни — для лёгких нагрузок
- Металлические шестерни — для высоких нагрузок
| № | Название | Тип | Описание | Примечания |
|---|---|---|---|---|
| 1 | GND (коричневый/чёрный) | Земля | Подключение земли | Подключите к GND микроконтроллера и/или внешнего источника питания |
| 2 | VCC (красный) | Питание | Вход питания (4.8В-6В, иногда до 7.2В) | Напряжение зависит от модели — проверьте даташит. Используйте внешний источник для нескольких сервоприводов |
| 3 | DATA/Signal (оранжевый/жёлтый/белый) | PWM | PWM управляющий сигнал | Подключите к PWM GPIO пину микроконтроллера |
Подключение сервопривода к ESP32
Для управления PWM сервоприводом с помощью микроконтроллера, подключите провод земли (коричневый/чёрный) к GND, провод питания (красный) к соответствующему источнику питания, а сигнальный провод (оранжевый/жёлтый/белый) к PWM GPIO пину.
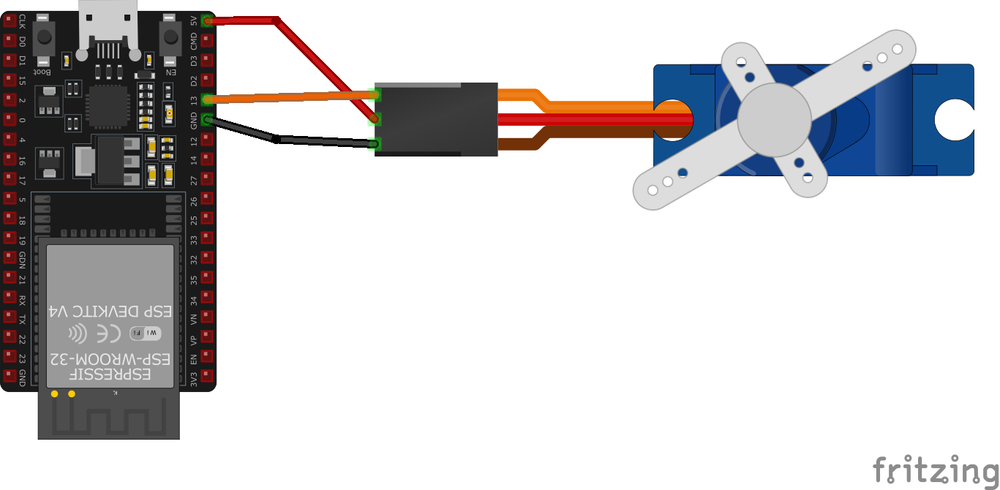
- Всегда соединяйте все земли вместе (ESP32 + источник питания + сервопривод)
- Добавьте конденсатор 100-470мкФ между питанием и землёй для уменьшения шумов
- Используйте библиотеку ESP32Servo или LEDC для PWM управления
| Провод сервопривода | Подключение | Пин ESP32 | Описание |
|---|---|---|---|
| GND (коричневый/чёрный) обязательно | → | GND | Земля для питания и сигнала |
| VCC (красный) обязательно | → | 5V или внешнее питание | Питание. Используйте внешний источник для нескольких сервоприводов или мощных моделей |
| DATA (оранжевый/жёлтый/белый) обязательно | → | GPIO 18 | PWM управляющий сигнал (50Гц, ширина импульса 1-2мс) |
Устранение неполадок сервоприводов
Распространённые проблемы и решения для запуска и эксплуатации сервоприводов.
Сервопривод не реагирует
Нет движения при подаче сигнала
Проблема: сервопривод не двигается при отправке команд.
Возможные причины: недостаточное питание, неправильное подключение проводов, неправильная конфигурация PWM, неисправность сервопривода.
Решение: проверьте подключение всех трёх проводов. Убедитесь, что питание соответствует требованиям сервопривода (обычно 4.8-6В). Проверьте, что сигнальный провод подключён к PWM-пину микроконтроллера. Попробуйте использовать внешний источник питания, если тока от микроконтроллера недостаточно.
Дрожание и нестабильная работа
Сервопривод дёргается или гудит
Проблема: сервопривод дёргается, гудит или не может удержать позицию.
Возможные причины: недостаточное питание (низкий ток), шумы в цепи питания, слишком длинные провода, механическое сопротивление.
Решение: используйте стабильный источник питания с достаточным током (минимум 1А на сервопривод). Добавьте конденсатор 100-470мкФ параллельно питанию. Сократите длину проводов. Проверьте, что сервопривод не заблокирован механически.
Угол поворота не соответствует ожиданиям
Сервопривод поворачивается больше или меньше
Проблема: при команде write(90) сервопривод поворачивается на другой угол.
Возможные причины: разные диапазоны ширины импульса у разных моделей сервоприводов, неправильная калибровка.
Решение: используйте функцию attach() с дополнительными параметрами минимальной и максимальной ширины импульса. Для Arduino: servo.attach(pin, min, max). Типичные значения: 1000мкс (0°) — 2000мкс (180°), но для некоторых моделей могут отличаться.
Перегрев сервопривода
Сервопривод сильно нагревается
Проблема: сервопривод сильно нагревается во время работы.
Возможные причины: перегрузка (крутящий момент превышает допустимый), длительная непрерывная работа, заклинивание механизма.
Решение: проверьте, что нагрузка на сервопривод не превышает его максимальный крутящий момент. Дайте сервоприводу время на охлаждение между интенсивными операциями. Проверьте механизм на предмет заклинивания или посторонних предметов. Если требуется непрерывная работа под нагрузкой, рассмотрите использование более мощного сервопривода или мотор-редуктора.
Советы по отладке
Serial монитор
Проверка логов и состояния
Проверка напряжения
Мультиметр и целостность цепи
Дополнительные ресурсы
Примеры программирования сервоприводов
Готовые к использованию примеры кода для различных платформ и фреймворков.
Пример для Arduino
Совместим с Arduino IDE и платами ESP32
C++
Пример для Arduino
Совместим с Arduino IDE и платами ESP32
#include <Servo.h> // Подключаем библиотеку Servo
Servo myServo; // Создаём объект сервопривода
void setup() {
myServo.attach(9); // Подключаем сервопривод к пину 9
}
void loop() {
myServo.write(0); // Поворачиваем на 0 градусов
delay(1000); // Ждём 1 секунду
myServo.write(90); // Поворачиваем на 90 градусов
delay(1000); // Ждём 1 секунду
myServo.write(180); // Поворачиваем на 180 градусов
delay(1000); // Ждём 1 секунду
}Библиотека Servo.h упрощает управление сервоприводами с помощью PWM сигналов. Она работает с различными хобби сервоприводами, такими как SG90, MG90S и MG996R.
- Servo myServo; — создаёт объект сервопривода
- myServo.attach(pin); — подключает сервопривод к GPIO пину
- myServo.write(angle); — поворачивает сервопривод на заданный угол (0°–180°)
Пример для ESP-IDF
Официальный фреймворк Espressif
C++
Пример для ESP-IDF
Официальный фреймворк Espressif
#include "driver/ledc.h"
#include "esp_err.h"
#define SERVO_PIN GPIO_NUM_18 // Пин для сигнала сервопривода
#define SERVO_MIN_PULSEWIDTH 500 // Минимальная ширина импульса в микросекундах (0°)
#define SERVO_MAX_PULSEWIDTH 2500 // Максимальная ширина импульса (180°)
#define SERVO_MAX_DEGREE 180 // Максимальный угол в градусах
// Функция расчёта ширины импульса для заданного угла
uint32_t calculate_pulse_width(uint32_t angle) {
return SERVO_MIN_PULSEWIDTH + ((SERVO_MAX_PULSEWIDTH - SERVO_MIN_PULSEWIDTH) * angle) / SERVO_MAX_DEGREE;
}
void app_main() {
// Настройка таймера LEDC
ledc_timer_config_t ledc_timer = {
.speed_mode = LEDC_LOW_SPEED_MODE,
.timer_num = LEDC_TIMER_0,
.duty_resolution = LEDC_TIMER_16_BIT,
.freq_hz = 50, // Частота для сервоприводов
.clk_cfg = LEDC_AUTO_CLK
};
ledc_timer_config(&ledc_timer);
// Настройка канала LEDC
ledc_channel_config_t ledc_channel = {
.speed_mode = LEDC_LOW_SPEED_MODE,
.channel = LEDC_CHANNEL_0,
.timer_sel = LEDC_TIMER_0,
.intr_type = LEDC_INTR_DISABLE,
.gpio_num = SERVO_PIN,
.duty = 0,
.hpoint = 0
};
ledc_channel_config(&ledc_channel);
while (1) {
// Поворот на 0°
uint32_t duty = calculate_pulse_width(0);
ledc_set_duty(LEDC_LOW_SPEED_MODE, LEDC_CHANNEL_0, duty);
ledc_update_duty(LEDC_LOW_SPEED_MODE, LEDC_CHANNEL_0);
vTaskDelay(pdMS_TO_TICKS(1000));
// Поворот на 90°
duty = calculate_pulse_width(90);
ledc_set_duty(LEDC_LOW_SPEED_MODE, LEDC_CHANNEL_0, duty);
ledc_update_duty(LEDC_LOW_SPEED_MODE, LEDC_CHANNEL_0);
vTaskDelay(pdMS_TO_TICKS(1000));
// Поворот на 180°
duty = calculate_pulse_width(180);
ledc_set_duty(LEDC_LOW_SPEED_MODE, LEDC_CHANNEL_0, duty);
ledc_update_duty(LEDC_LOW_SPEED_MODE, LEDC_CHANNEL_0);
vTaskDelay(pdMS_TO_TICKS(1000));
}
}
Этот код управляет сервоприводом с помощью LEDC PWM драйвера ESP-IDF. Функция calculate_pulse_width вычисляет ширину импульса для заданного угла (0° до 180°). Таймер LEDC настроен на 50 Гц, а пин GPIO (например, GPIO_NUM_18) сконфигурирован как выход для PWM сигнала.
Пример для ESPHome
Конфигурация для Home Assistant
YAML
Пример для ESPHome
Конфигурация для Home Assistant
servo:
- id: my_servo
output: pwm_output
output:
- platform: esp8266_pwm
id: pwm_output
pin: GPIOXX
frequency: 50 Hz
Конфигурация определяет сервопривод, управляемый через PWM на ESP-устройстве. Блок servo указывает ID сервопривода и связывает его с PWM выходом, а блок output настраивает PWM сигнал (частота и пин GPIO).
Для получения дополнительных деталей см. документацию ESPHome Servo Component.
Пример для PlatformIO
Профессиональная среда разработки
C++
Пример для PlatformIO
Профессиональная среда разработки
platformio.ini
[env:esp32dev]
platform = espressif32
board = esp32dev
framework = espidf
monitor_speed = 115200main.cpp
#include <Arduino.h>
#include <Servo.h> // Подключаем библиотеку Servo
Servo myServo; // Создаём объект сервопривода
void setup() {
myServo.attach(18); // Подключаем сервопривод к GPIO 18
}
void loop() {
myServo.write(0); // Поворачиваем на 0 градусов
delay(1000); // Ждём 1 секунду
myServo.write(90); // Поворачиваем на 90 градусов
delay(1000); // Ждём 1 секунду
myServo.write(180); // Поворачиваем на 180 градусов
delay(1000); // Ждём 1 секунду
}
Этот код демонстрирует управление сервоприводом в PlatformIO с использованием Arduino фреймворка. Сервопривод подключён к GPIO 18, а его положение контролируется с помощью методов myServo.attach() и myServo.write(). Дополнительные библиотеки не требуются, так как библиотека Arduino Servo встроена в фреймворк.
Пример для MicroPython
Python для микроконтроллеров
Python
Пример для MicroPython
Python для микроконтроллеров
from machine import Pin, PWM
from time import sleep
# Настраиваем PWM на GPIO18
servo = PWM(Pin(18))
servo.freq(50) # Устанавливаем частоту 50 Гц
# Функция для поворота сервопривода на заданный угол (0° - 180°)
def set_servo_angle(angle):
# Преобразуем угол в скважность (ширина импульса в микросекундах)
duty = int(40 + (angle / 180) * 115) # Диапазон скважности: 40-155 (прибл. 500-2500 мкс)
servo.duty(duty)
# Основной цикл
while True:
set_servo_angle(0) # Поворот на 0°
sleep(1) # Ждём 1 секунду
set_servo_angle(90) # Поворот на 90°
sleep(1) # Ждём 1 секунду
set_servo_angle(180) # Поворот на 180°
sleep(1) # Ждём 1 секунду
Этот код MicroPython управляет сервоприводом с помощью PWM на GPIO 18. Объект PWM устанавливает частоту 50 Гц для сервопривода. Функция set_servo_angle(angle) преобразует угол (0° до 180°) в скважность для позиционирования сервопривода.
В заключение о сервоприводах
Сервоприводы — это универсальные и надёжные устройства для точного управления положением в ваших проектах. Благодаря поддержке множества платформ разработки, включая Arduino, ESP-IDF, ESPHome, PlatformIO и MicroPython, они являются отличным выбором для робототехники, автоматизации и различных DIY-проектов.
Для оптимальной работы всегда используйте стабильный источник питания с достаточным током. При управлении несколькими сервоприводами используйте внешний источник питания. Добавляйте конденсаторы для фильтрации помех.
Всегда проверяйте требования к питанию и подключению пинов перед включением проекта. Не превышайте максимальный крутящий момент сервопривода. Используйте защитные диоды при работе с индуктивными нагрузками.